










Россия
Россия
Россия
УДК 621.313.2 Машины постоянного тока
Приводятся результаты экспериментальных исследований крутящего момента электродвигателей постоянного тока для промыслового катамарана. Современное состояние маломерного рыболовного флота оставляет желать лучшего. Строительство нового промыслового флота под инвестквоты не затрагивает маломерный флот. Наступает эпоха использования экологически чистых технологий, например судов с электротягой. Сопряжение тяговых характеристик рыболовного судна с агрегатным сопротивлением орудия промышленного рыболовства является главной проблемой при проектировании орудий лова. Корректное соотношение тяги (как основного параметра) с агрегатным сопротивлением обеспечивает эффективное и безопасное ведение промысла. Также к вопросам тяговых характеристик можно отнести все промысловые устройства, от траловых лебедок, заканчивая стрелами. Но это не ограничивает использование электромоторов на флоте. При этом одной из важных характеристик электромотора является крутящий момент, который может быть статическим и динамическим. Статический крутящий момент измеряется при отсутствии вращения вала, но при нагрузке. Динамический крутящий момент замеряется при вращении вала электромотора. В ходе экспериментов на специально сконструированной установке по измерению крутящего момента исследованы механические и электродинамические характеристики электромоторов постоянного тока. Измерительный комплекс включает в себя тензодатчик, тахометр и два лабораторных блока питания, которыми задается значение напряжения для исследования. Приведены технические данные этих приборов. По полученным экспериментальным данным построены графики зависимостей. В дальнейшем необходимо проведение аппроксимаций с выявлением наименьшего значения ошибки, что позволит определить вид зависимости. Это даст четкое понимание взаимосвязи изучаемых механических и электродинамических характеристик, что можно будет использовать при проектировании маломерного флота, в частности промыслового катамарана.
маломерный флот, промысловый катамаран, электродвигатель, крутящий момент, постоянный ток
Введение
Маломерные суда являются неотъемлемой частью прибрежного и внутреннего рыболовного флота. Двигатели судов маломерного флота могут быть электрическими, гидравлическими, внутреннего сгорания и гибридными. Двигатель подбирается исходя из экономической целесообразности. Следует понимать, что прибрежный промысел гидробионтов и лов во внутренних водоемах – озерах и водохранилищах – с применением рыболовной единицы, такой как промысловое судно, сопряжен с сопоставлением располагаемой тяги судна и сопротивления орудия рыболовства, а если оно активное, то с агрегатным сопротивлением рыбопромысловой системы, включающей в себя сопротивления всех элементов при их буксировке, например трала [1, 2]. В статье рассматривается применение электродвигателей на промысловом катамаране, который использует тягу от электромотора с постоянным напряжением. К основным характеристикам электродвигателя (ЭД) постоянного напряжения относятся [3–6]:
– напряжение номинальное (максимальное) Uн;
– сила тока номинальная (при стопоре вала) Iн;
– сопротивление источника rн;
– сопротивление номинальное (при стопоре вала) Rн;
– напряжение двигателя Uд;
– сила тока двигателя Iд;
– сопротивление проводки двигателя Rд;
– заряд тока qд;
– электродвижущая сила (ЭДС) двигателя εд;
– электрическая номинальная мощность (максимальная) Nн;
– механическая мощность на валу двигателя Nд;
– крутящий момент M;
– статический крутящий момент Mс;
– динамический крутящий момент Mд;
– количество оборотов ротора (вала) в минуту n;
– угловая скорость вращения ротора (вала) ω;
– коэффициент полезного действия η.
Запишем основные формулы процессов, которые протекают с ЭД.
Первый процесс, электродинамический:
– связь напряжения, силы тока и сопротивления на стопоре ротора (вала):
![]()
– электрической номинальной мощности:
![]()
– напряжения, силы тока и сопротивления при вращении вала под нагрузкой:
![]()
– электрической мощности при вращении вала под нагрузкой:
![]()
– заряд:
![]()
где t – время, с;
– ЭДС:
![]()
Второй процесс, механический:
– мощность на валу ЭД:
– коэффициент полезного действия
![]()
Третий процесс тепловой.
Количество тепла, выделенное в ЭД, определяется законом Джоуля – Ленца:
![]()
В соответствии с теорией мультифизического подобия [7, 8] получим зависимость масштабов подобия крутящего момента от масштаба угловой скорости CM = f(Cω) (рис. 1) – все масштабы подобия являются величинами безразмерными и выражаются через масштаб подобия длины Cl, который принимает различные значения при введенном значении i от 1 до 100.
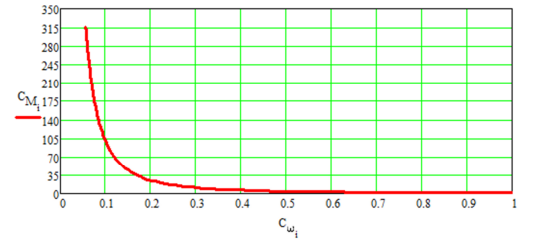
Рис. 1. Зависимость масштабов подобия CM = f(Cω)
Fig. 1. Dependence of similarity scales CM = f(Cω)
На рис. 2 изображен график зависимости масштабов подобия мощности на валу ЭД от масштаба крутящего момента CN = f(CM) и масштаба угловой скорости CN = f(Cω).
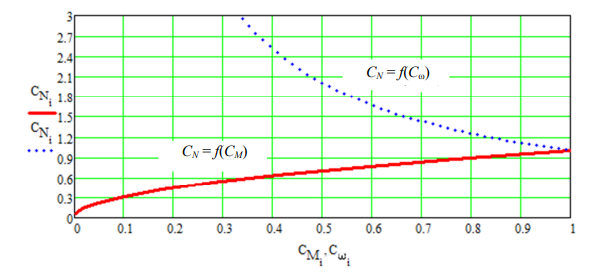
Рис. 2. Зависимости масштабов подобия CN = f(CM) и CN = f(Cω)
Fig. 2. Dependencies of similarity scales CN = f(CM) and CN = f(Cω)
На рис. 3 приведен график зависимости масштабов подобия крутящего момента на валу ЭД от масштаба напряжения CM = f(CU) и масштаба силы тока CM = f(CI).
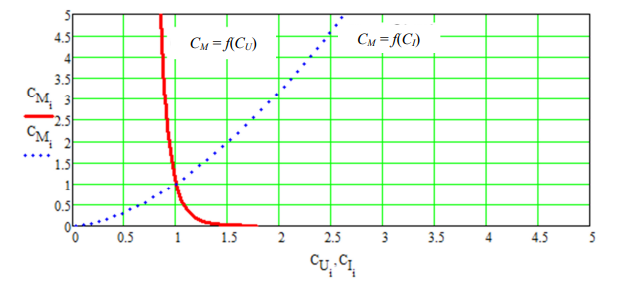
Рис. 3. Зависимости масштабов подобия CM = f(CU) и CM = f(CI)
Fig. 3. Dependencies of similarity scales CM = f(CU) and CN = f(CI)
Цель и задачи
Цель работы заключается в определении крутящего момента ЭД постоянного тока для дальнейших исследований с промысловым катамараном. С этой целью проведены эксперименты с ЭД постоянного тока на установке, которая изображена на рис. 4.
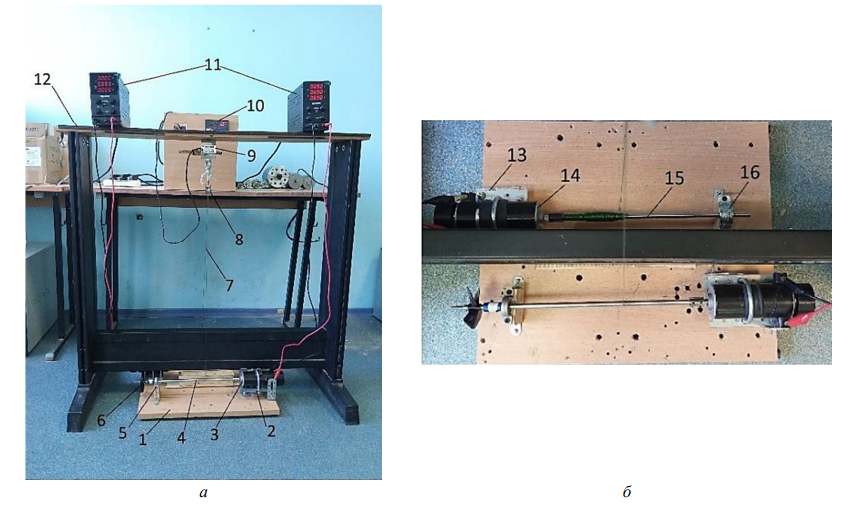
Рис. 4. Экспериментальная установка для исследования крутящего момента на валу ЭД:
1 – площадка; 2 – регулируемая по высоте платформа; 3 – испытуемый ЭД; 4 – выбирающий вал;
5 – стойка с подшипником; 6 – винт; 7 – нитка; 8 – неподвижный блок; 9 – тензодатчик;
10 – индикатор тензодатчика; 11 – лабораторные блоки питания; 12 – основная стойка; 13 – платформа;
14 – загрузочный ЭД; 15 – травящий вал; 16 – стойка с подшипником; а – вид спереди; б – вид площадки сверху
Fig. 4. Experimental installation for studying the torque on the EM shaft:
1 – site; 2 – height-adjustable platform; 3 – test EM; 4 – selection shaft; 5 – rack with bearing; 6 – screw;
7 – thread; 8 – fixed block; 9 – load cell; 10 – load cell indicator; 11 – laboratory power supplies; 12 – main rack;
13 – platform; 14 – loading EM; 15 – etching shaft; 16 – rack with bearing; a – front view; б – site view from above
Работа установки заключается в том, что при наматывании нитки на вращающийся вал посредством испытуемого электромотора создается крутящий момент M. При холостом ходе (без нитки
и нагрузок) крутящий момент отсутствует или, что вернее утверждать, приближен к нулю. Работа двигателя будет уходить на сопротивление внутренним и внешним факторам. Несущественными значениями силы трения можно пренебрегать. На установке (см. рис. 4) динамический крутящий момент возникает при совершении работы по наматыванию нитки. Вспомогательным электромотором, который не является испытуемым, можно создавать различные нагрузки, которые меняют значение силы натяжения в нитке и, как следствие, получаются различные значения динамического момента. При максимальной нагрузке, которую надежнее создать стопорением вала вспомогательного ЭД, где изначально намотана нитка, получаем статический момент. В такой ситуации первый вал пытается вращаться, заставляя электродвигатель работать со всей мощностью. Таким образом, крутящий момент зависит от силы натяжения и вычисляется по формуле
![]() ,
,
где Tн – сила натяжения нитки, Н; r – радиус вала, м.
Материал и методика
При включении установки тензодатчик 9 передает электрический сигнал на индикатор 10. Эти показания обозначим как Nm, в дальнейшем будет необходимо проводить пересчет этих показаний для получения истинной силы натяжения нитки Tн. Загрузочный ЭД 14 создает нагрузку для испытуемого ЭД 3, что позволяет получать дополнительные данные (точки), которые в затем пригодятся для более точного построения графиков зависимостей по таким физическим величинам, как сила тока I, крутящий момент M и частота оборотов n. Обороты измеряются тахометром по винту 6 от выбирающего вала 4. Винт установлен четырехлопастной, поэтому измеренные значения требуется поделить на 4. Блоками питания 11 регулируется напряжение U, с них же получаем выходную силу тока I. Пересчет показаний индикатора тензодатчика происходит по коэффициенту пересчета k, который вычисляется по формуле
![]()
где mг – масса грузиков, кг; Nm – безразмерные показания индикатора тензодатчика, исходя из построенного тарировочного графика (рис. 5).
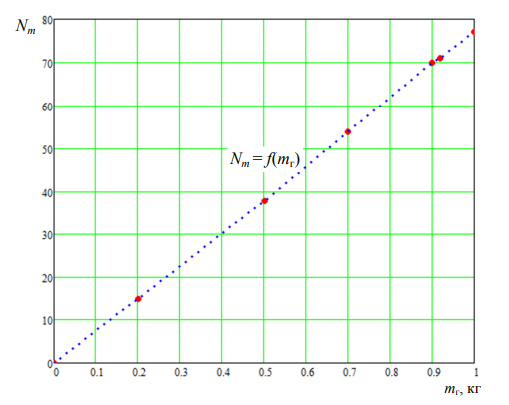
Рис. 5. Тарировочный график Nm = f(mг)
Fig. 5. Calibration graph Nm = f(mг)
Процесс тарирования осуществляется по имеющимся грузикам с определенными весовыми значениями. При пересчете показаний Nm на значения сил натяжения нитки Tн необходимо учитывать то, что индикатор тензодатчика показывает удвоенное значение, т. к. натяжение создается двумя нитками. Кроме того, получаемое выражение Nm / 2k необходимо домножить на константу ускорения свободного падения g, чтобы в конечном итоге получить искомое значение силы натяжения нити Tн.
По тарировочному графику (см. рис. 5) среднее значение k составило 76,68 1/кг, а значение ускорения свободного падение g примем равным
9,8 Н/кг. Тогда получаем, что
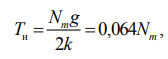 ,
,
где k – коэффициент пересчета показаний индикатора тензодатчика, 1/кг.
На рис. 6–8 представлены необходимые для исследования приборы.
|
|
|
|
||
|
Рис. 6. Лазерный тахометр
Fig. 6. Laser tachometer |
Рис. 7. Регулируемый блок питания
Fig. 7. Adjustable power supply |
|
||
|
|
|
|
||
|
|
а |
б |
||




Рис. 8. Тензодатчик (а) и индикатор тензодатчика (б)
Fig. 8. Load cell (a) and load cell indicator (б)
Цифровой тахометр LCD RPM необходим для замера количества оборотов. Он имеет большой ЖК-дисплей, на котором отображается до 5 цифр. Частоту оборотов можно измерять как в ручном режиме при зажатии средней кнопки TEST, так и в автоматическом режиме при нажатии на кнопку AUTO. На данном приборе можно получать средние, максимальные и минимальные значения количества оборотов. Технические характеристики тахометра LCD RPM указаны в табл. 1.
Таблица 1
Table 1
Характеристики лазерного тахометра LCD RPM
Characteristics of the LCD RPM laser tachometer
|
Модель |
Диапазон измерения, об/мин |
Точность, об/мин |
Размер, мм |
Вес, г |
Батарея |
|
LCD RPM |
2,5–99 999 |
0,1–1 |
130 × 70 × 90 |
170 |
ААА |
Лабораторные блоки питания (ЛБП), они же импульсные блоки питания, предназначены для регулирования напряжения. Входное напряжение от сети преобразуется на выходе в необходимое для исследования значение. Также данный прибор обеспечивает безопасность проведения опытов. Кроме регулирования напряжения им можно регулировать силу тока. Эти значения указываются на дисплее с выходной электрической мощностью. Прибор имеет тонкую и грубую настройку. Технические характеристики используемых ЛБП модели Amperin AI-W605 представлены в табл. 2.
Таблица 2
Table 2
Характеристики лабораторного блока питания Amperin AI-W605
Features of the Amperin AI-W3010 laboratory power supply unit
|
Модель |
Входное напряжение, В |
Выходное |
Максимальный ток, А |
Пульсация напряжения, % |
Пульсация |
Температурный коэффициент, PPm/°C |
Температурный диапазон, °C |
Размер, мм |
Вес, кг |
|
Amperin |
220 ± 10 % |
60 |
5 |
≤0,5 |
≤3 |
≤300 |
от 0 до +40 |
240 × 85 × 155 |
1,2 |
S-образный тензодатчик модели DYLY-103 предназначен для измерения силы, которая отображается на весовом индикаторе. Внутри тензометрического датчика имеются резисторы, электрическое сопротивление которых изменяется под действием деформации проводящих элементов. Под деформацией имеется в виду удлинение проводников и уменьшение их поперечного сечения под действием внешней силы, например подвешенного к датчику груза. В регистрации изменений сопротивления и заключается принцип работы прибора. Электрические сигналы подаются на индикатор и преобразуются в численное значение на дисплее. Технические характеристики тензодатчика DYLY-103 представлены в табл. 3.
Таблица 3
Table 3
Характеристики тензодатчика DYLY-103
Characteristics of load cell DYLY-103
|
Модель |
Максимальное |
Точность, % |
Чувствительность, мВ/В |
Номинальное |
Напряжение |
Температурный |
Размер, мм |
Резьба, мм |
|
DYLY-103 |
50 |
0,03 |
2,0 ± 10 % |
350 |
10–15 |
От –20 до +80 |
50,8 ×12,7 × 63,5 |
M8 × 1,25 |
Методика проведения экспериментов с каждым испытуемым ЭД:
1. Подключение индикатора тензодатчика к электрической сети и его тарировка.
2. Построение тарировочного графика с вычислением коэффициента пересчета.
3. Подключение ЛБП к сети и их подсоединения к ЭД.
4. Включение блоков питания и их регулировка до нужного значения напряжения.
5. Измерение силы тока и оборотов на холостом ходу без нитки.
6. Измерение силы тока, оборотов и получение показаний индикатора с ниткой.
7. Повтор п. 6 с зажатием травящего вала.
8. Первичная обработка опытных данных.
Результаты и обсуждение
При проведении экспериментов использовались стальной вал диаметром Dв = 8 мм, радиусом rв = 4 мм и длиной lв = 300 мм и нитка из Dyneema диаметром 0,3 мм и длиной 100 м. Полученные в ходе эксперимента опытные данные внесены в табл. 4.
Таблица 4
Table 4
Характеристики ЭД и опытные данные
EM characteristics and experimental data
|
ЭД |
Характеристика ЭД |
Эксперименты |
||||||
|
Максимальное |
Ток холостого |
Сопротивление R, |
Натяжение нити Tн, Н |
Крутящий момент M, |
Обороты n, об/мин |
Напряжение Uэ, В |
Сила тока Iэ , А |
|
|
RS-380
|
7,2 |
0,35 |
1,8 |
– |
– |
3 200 |
7,2 |
1,4 |
|
4,5 |
0,018 |
750 |
3,6 |
|||||
|
6,8 |
0,027 |
0 |
4,8 |
|||||
|
DC12V
|
12 |
0,35 |
1,4 |
– |
– |
2 875 |
12 |
2,8 |
|
8,8 |
0,035 |
750 |
4,5 |
|||||
|
14,5 |
0,058 |
0 |
5,0 |
|||||
|
– |
– |
2 750 |
10 |
1,5 |
||||
|
5,4 |
0,021 |
525 |
3,5 |
|||||
|
9,1 |
0,036 |
0 |
3,9 |
|||||
|
– |
– |
2 275 |
7,4 |
0,9 |
||||
|
5,8 |
0,023 |
450 |
3,0 |
|||||
|
7,4 |
0,029 |
0 |
3,2 |
|||||


Окончание табл. 4
Ending of Table 4
|
ЭД |
Характеристика ЭД |
Эксперименты |
||||||
|
Максимальное |
Ток холостого |
Сопротивление R, |
Натяжение нити Tн, Н |
Крутящий момент M, |
Обороты n, об/мин |
Напряжение Uэ, В |
Сила тока Iэ , А |
|
|
DC24V
|
24 |
0,2 |
4,0 |
– |
– |
3 150 |
24 |
1,0 |
|
11,5 |
0,046 |
345 |
3,0 |
|||||
|
20,5 |
0,082 |
0 |
3,4 |
|||||
|
– |
– |
1 800 |
12 |
0,35 |
||||
|
8,4 |
0,034 |
375 |
1,6 |
|||||
|
10,7 |
0,043 |
0 |
1,9 |
|||||
|
– |
– |
1 625 |
7,4 |
0,25 |
||||
|
5,3 |
0,021 |
250 |
1,1 |
|||||
|
8,6 |
0,034 |
0 |
1,5 |
|||||
|
500W
|
48 |
– |
2,0 |
– |
– |
8 750 |
48 |
1,6 |
|
16,0 |
0,064 |
160 |
4 |
2,8 |
||||
|
38,4 |
0,154 |
0 |
4,5 |
4,8 |
||||
|
– |
– |
6 675 |
36 |
1,1 |
||||
|
16,0 |
0,064 |
160 |
4 |
2,8 |
||||
|
38,4 |
0,154 |
0 |
4,5 |
4,8 |
||||
|
– |
– |
5 000 |
21 |
0,72 |
||||
|
16,0 |
0,064 |
160 |
4 |
2,8 |
||||
|
38,4 |
0,154 |
0 |
4,5 |
4,8 |
||||
|
HANPOSE 895-360W
|
24 |
– |
1,3 |
– |
– |
2 500 |
24 |
4,8 |
|
10,7 |
0,043 |
129 |
3,2 |
3,8 |
||||
|
16,0 |
0,064 |
0 |
3 |
4,8 |
||||
|
– |
– |
1 500 |
12 |
1,6 |
||||
|
10,7 |
0,043 |
129 |
3,2 |
3,8 |
||||
|
16,0 |
0,064 |
0 |
3 |
4,8 |
||||
|
– |
– |
875 |
7,4 |
1,3 |
||||
|
10,7 |
0,043 |
129 |
3,2 |
3,8 |
||||
|
16,0 |
0,064 |
0 |
3 |
4,8 |
||||
|
HANPOSE 997
|
36 |
– |
0,1 |
– |
– |
20 000 |
36 |
2,0 |
|
16,0 |
0,064 |
625 |
2,0 |
4,8 |
||||
|
18,6 |
0,074 |
0 |
1,4 |
4,8 |
||||
|
– |
– |
15 000 |
24 |
1,3 |
||||
|
14,1 |
0,056 |
500 |
2,0 |
4,9 |
||||
|
15,4 |
0,061 |
0 |
1,2 |
4,9 |
||||
|
– |
– |
7 500 |
12 |
1,0 |
||||
|
17,0 |
0,068 |
625 |
2,5 |
4,9 |
||||
|
19,2 |
0,077 |
0 |
1,2 |
4,9 |
||||




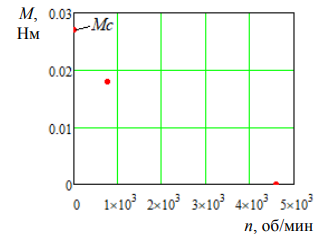
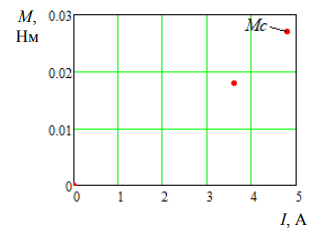
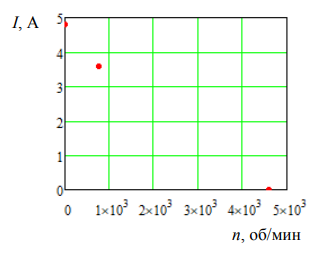
На основании табл. 4 построим графики опытных данных зависимостей M = f(n), M = f(I) и I = f(n) (рис. 9–17).
 |
|
|
Рис. 9. Опытные данные зависимости M = f(n)
Fig. 9. Experimental dependence data M = f(n) |
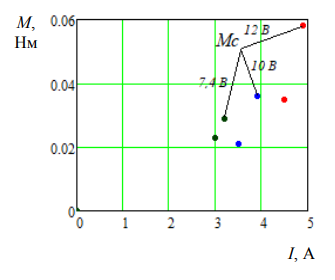
Рис. 10. Опытные данные зависимости M = f(I)
Fig. 10. Experimental dependence data M = f(I) |
|
|
|
|
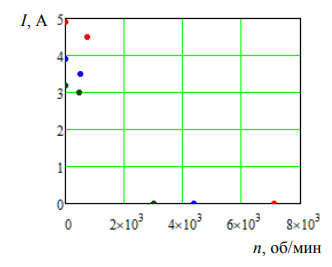
Рис. 11. Опытные данные зависимости I = f(n)
Fig. 11. Experimental dependence data I = f(n) |
Рис. 12. Опытные данные зависимости M = f(n)
Fig. 12. Experimental dependence data M = f(n) |
|
|
|
|
Рис. 13. Опытные данные зависимости M = f(I)
Fig. 13. Experimental dependence data M = f(I) |
Рис. 14. Опытные данные зависимости I = f(n)
Fig. 14. Experimental dependence data I = f(n) |
|
|
|
|
Рис. 15. Опытные данные зависимости M = f(n)
Fig. 15. Experimental dependence data M = f(n) |
Рис. 16. Опытные данные зависимости M = f(I)
Fig. 16. Experimental dependence data M = f(I) |
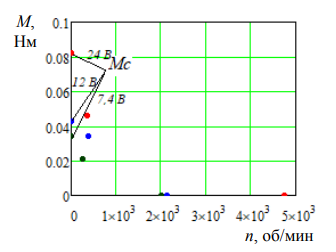
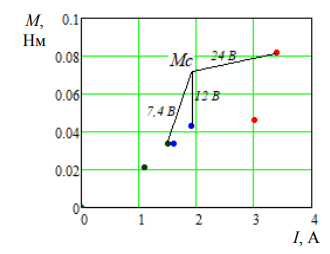
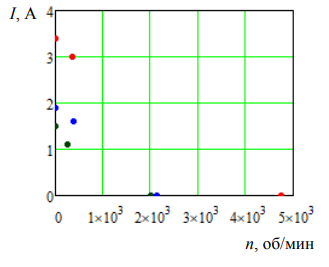
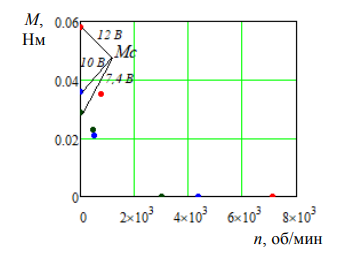
Рис. 17. Опытные данные зависимости I = f(n) для ЭД DC24V на 24, 12, 7,4 В
Fig. 17. Experimental dependence data I = f(n) for EM DC24V with 24, 12, 7.4 V
Чем больше опытных данных, тем более явной становится зависимость. Для ЭД 500W, HANPOSE 895-360W и HANPOSE 997 статический и динамический моменты не были определены по необходимым значениям напряжения. Зависимости масштабов подобия, используемые для анализа электродинамических сил электромотора, представлены на рис. 18–20.
|
|
|
|
Рис. 18. Линейная зависимость масштабов подобия
Fig. 18. Linear dependence of similarity scales |
Рис. 19. Линейная зависимость масштабов подобия
Fig. 19. Linear dependence of similarity scales |
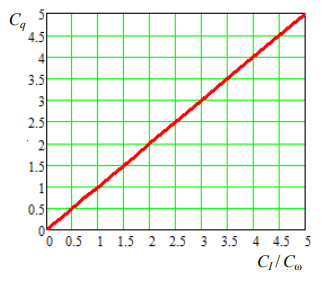
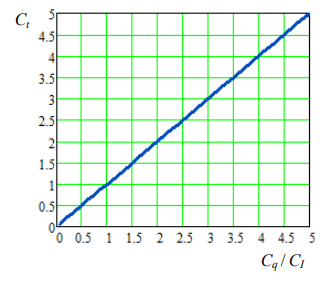
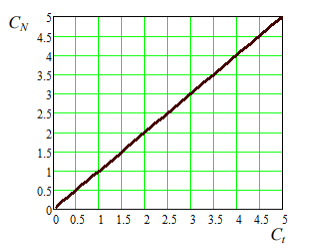
Рис. 20. Линейная зависимость масштабов подобия CN = f(Ct)
Fig. 20. Linear dependence of similarity scales CN = f(Ct)
В дальнейшем требуется проведение аппроксимаций для имеющихся опытных данных с выявлением наименьшей ошибки аппроксимации. Это даст четкую зависимость физических величин, на основании чего можно будет делать различные выводы по электромоторам. Данное исследование необходимо для обоснования механической мощности главного двигателя рыболовного судна при работе на траловом или ином виде промысла. Вспомогательные моторы (промысловые лебедки) также могут быть объектом для исследования.
Заключение
В статье приводятся результаты исследований крутящего момента электродвигателей постоянного тока для промыслового катамарана. В ходе испытаний исследованы механические и электродинамические характеристики электромоторов. Рассмотрены динамический и статический крутящие моменты, значения которых непосредственно влияют на выходную механическую мощность электродвигателя. По полученным экспериментальным данным были построены графики зависимостей, дальнейшая обработка которых позволит определить их взаимосвязь. Исследование имеет важное значение для проектирования судов маломерного рыболовного флота.
1. Недоступ А. А., Насенков П. В., Коновалова К. В., Сергеев Е. И., Волошин А. А., Анфилофьев Е. А., Афиногенов К. В., Кармашов Т. Б., Терентьева К. А. Экспериментальные исследования тяги модели катера в опытовом бассейне КГТУ для условий буксировки траловых конструкций // Актуальные проблемы освоения биологических ресурсов Мирового океана: материалы VII Междунар. науч.-техн. конф. Владивосток: Изд-во Дальрыбвтуза, 2024. С. 201–209.
2. Недоступ А. А., Сергеев Е. И., Насенков П. В., Коновалова К. В., Волошин А. А., Анфилофьев Е. А., Афиногенов К. В., Кармашов Т. Б., Терентьева К. А. Мультифизическое подобие характеристик катамарана с ЭД и тралового комплекса // Актуальные проблемы освоения биологических ресурсов Мирового океана: материалы VII Междунар. науч.-техн. конф. Владивосток: Изд-во Дальрыбвтуза, 2024. С. 210–219.
3. Битюцкий И. Б., Музылева И. В. Электрические машины. Двигатель постоянного тока. Курсовое проектирование: учеб. пособие. СПб.: Лань, 2022. 168 с.
4. Битюцкий И. Б., Музылева И. В. Электрические машины. Двигатель постоянного тока. Практикум: учеб. пособие. СПб.: Лань, 2021. 168 с.
5. Кутарев А. М. Проектирование двигателей постоянного тока параллельного возбуждения: учеб. пособие. Оренбург: ГОУ ОГУ, 2006. 159 с.
6. Муконин А. К., Романов А. В., Трубецкой В. А. Электрический привод: учеб. пособие. Воронеж: ФГБОУВПО «Воронежский государственный технический университет», 2019. Ч. 1. 166 с.
7. Недоступ А. А., Ражев А. О. Создание правил мультифизического подобия тралового комплекса // Морские интеллектуальные технологии. 2021. Т. 1. № 1. С. 132–137.
8. Недоступ А. А., Ражев А. О. Критерии мультифизического подобия тралового комплекса // Морские интеллектуальные технологии. 2021. Т. 1. № 4. С. 237–242.
