











ФГУП «Атомфлот» (старший помощник капитана)
Россия
Россия
Россия
Россия
Буксировка является одной из сложных и рисковых задач судовождения, т. к. в этом случае задействовано два и более судна одновременно. Аварийных случаев, связанных с буксировкой, зафиксировано минимальное количество, однако они все еще происходят, остается вопрос повышения безопасности подобных операций. Многолетние исследования и практический опыт проведения буксирных операций подтверждает прямую зависимость безопасности их проведения от траектории движения буксируемого судна. Результаты проведенного анализа свидетельствуют о том, что недостатком существующих методов буксировки судов является рыскание буксируемого судна, приводящее к излишне большой потере в скорости даже при слабом волнении на море, что вызвано в основном наличием внешних возмущений. Доказано, что для повышения безопасности проведения буксирных операций необходима стабилизация рыскания буксируемого судна. Разработан алгоритм стабилизации курса судна, который позволяет решить задачу буксировки по заданной траектории. Алгоритм составлен на основе модели углового движения судна, которая оперирует угловой скоростью буксируемого судна и углом перекладки руля. Использована такая модель углового движения буксируемого судна, в которой этой скоростью можно управлять воздействиями от угла перекладки руля. При этом алгоритм стабилизации «сходится» к устойчивому курсу даже при наличии внешних существенных возмущений. Полученная математическая модель решается методом наименьших квадратов и способна как стабилизировать, так и минимизировать рыскание буксируемого судна. Предложенный эмпирический способ оценки устойчивости курса буксируемого судна может обеспечить дополнительную навигационную безопасность буксирных операций.
алгоритм стабилизации, безопасность буксирных операций, буксировка судна, рыскание буксируемого судна, траектория движения
Введение
Обзор аварийности судов на море свидетельствует о низком уровне аварийности при потере и/или повреждении буксируемого объекта, однако аварии, допущенные в результате потери управляемости в ходе буксировки, все еще случаются и, следовательно, необходима проработка вопросов повышения безопасности при проведении буксирных операций по заданной траектории.
Теоретические исследования [1–5] подтверждают, что все буксируемые суда обладают рыскливостью, которую с точки зрения безопасности нужно нивелировать до допустимых пределов, т. е. стабилизировать их движение. Особенно остро эта проблема возникает при наличии серьезных внешних возмущений, обусловленных действием ветра и волны.
Рыскание буксируемого судна приводит к достаточно большой потере в скорости, поэтому целесообразно разработать алгоритм, позволяющий стабилизировать движение буксируемого судна, особенно при развитом волнении на море, и иметь производную от величины рыскания, в которой была бы минимально возможная составляющая от возмущения, вызывающая это рыскание. При составлении алгоритма стабилизации движения буксируемого судна и минимизации процесса его рыскания будем использовать такую модель углового движения буксируемого судна, в которой этой скоростью можно управлять воздействиями от угла перекладки руля.
Постановка задачи
Восстановление модели рыскания буксируемого судна можно осуществить с помощью полной модели углового движения судна, но такая модель сложна в реализации. Поэтому, основываясь на известном упрощении дифференциального уравнения углового движения буксируемого судна, используем для реализации стабилизации и уменьшения по модулю величины рыскания судна на буксире упрощенную модель вида:
![]() (1)
(1)
причем далее будем рассматривать модель движения устойчивого судна.
Уравнение (1) имеет два настраиваемых параметра: постоянную времени 1 / Т и коэффициент эффективности руля kδ. Ввиду сложной зависимости параметров Т и kδ от конкретных эксплуатационных условий буксировки желательно автоматически подстраивать эти параметры на основании информации об угловой скорости буксируемого судна ω и угла перекладки руля δ(t). Таким образом, задача состоит в том, чтобы при заданной структуре математической модели углового движения буксируемого судна и на основании измерений ω(t) и δ(t) осуществлять идентификацию параметров модели Т и kδ, которые способны как стабилизировать, так и минимизировать рыскание буксируемого судна.
Если параметры 1 / Т и kδ / T точно не известны, что равноценно изменению режима эксплуатации буксируемого судна, то при подстановке значений данных от реального буксируемого объекта dω(t) / dt, dω(t) и δ(t) в выражение (1) равенство не будет соблюдаться. Поэтому обозначим невязку уравнения (1) через ε(t), а параметры модели a1 = 1 / T и a2 = = kδ / T, тогда
![]() .
.
Качество идентификации параметров a1 и a2 можно оценивать с помощью метода наименьших квадратов с весовой функцией вида:
![]() .
.
Весовую функцию f(t) можно выбрать, например, из условия так, чтобы квадрат невязки е2(t) учитывался с тем большим весом, чем позже она была получена. Функцией f(t), удовлетворяющей этому условию, является экспонента
![]() .
.
Коэффициент затухания экспоненты α характеризует интервал осреднения квадрата невязки е2(t) и может быть подобран экспериментально. В дальнейшем будем предполагать, что процесс рыскания буксируемого судна наблюдается достаточно долго, чтобы принять нижний предел в критерии равным –∞. Таким образом, чтобы стабилизировать и минимизировать рыскание буксируемого судна, критерий задается так:
 .
.
Стабилизация процесса рыскания буксируемого судна
Необходимым условием минимума критерия будет выполнение системы уравнений относительно параметров а1 и а2:
Запишем эти условия:
Примем, что объект стационарен на интервале осреднения, задаваемом экспоненциальной весовой функцией, поэтому коэффициенты ai и а2 можно выносить за знак интеграла:
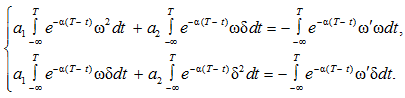 (2)
(2)
Полученную систему линейных уравнений можно разрешить относительно a1 и а2 или в векторной форме:
 .
.
Перепишем систему уравнений (2):
![]() . (3)
. (3)
Для получения решений вектора а* в рекуррентной форме продифференцируем равенство (3) по Т:
 .
.
Обозначив обратную матрицу
![]()
и взяв производную от γ(T), получим систему уравнений для рекуррентного расчета параметров:
 (4)
(4)
Если взять в качестве матрицы γ(Т) принужденное решение, при котором правая часть уравнения (4) обращается в нуль, то можно несколько упростить полученный алгоритм [1]. В данном случае таким принужденным решением будет выражение вида:
![]() .
.
Подставим это принужденное решение в уравнение для производной dа*/ dT и получим:
![]() .
.
В скалярной форме оно может быть записано так:
 (5)
(5)
Использование для упрощения полученного алгоритма принужденного решения уравнений (4) способно повлиять на его сходимость, поэтому далее целесообразно исследовать сходимость алгоритма (4). Пусть а10 и а20 – истинные значения искомых параметров, другими словами – соблюдается равенство (1):
![]() .
.
Тогда можно записать невязку уравнений в виде:
![]() .
.
Перепишем уравнения поиска (5) с учетом составленной невязки ε(t) и стационарности движения буксируемого судна (а10 = const и а20 = const):
 (6)
(6)
Алгоритм (6) сходится в смысле монотонного уменьшения суммы квадратов ошибок величины
![]() .
.
Действительно, производная от этой величины с учетом выражения (6):
![]() .
.
Так как производная является отрицательной величиной, это означает, что рыскание не может увеличиваться, следовательно, можно признать – алгоритм будет сходиться и обеспечивать стационарность движения буксируемого судна.
Обсуждение полученных результатов
Долгое время научные исследования в части повышения безопасности проведения буксирных операций проводились в направлении повышения эффективности управления буксирующим судном [4]. Однако безопасность выполнения буксирных операций в целом во многом зависит от траектории движения буксируемого судна, особенно если имеются дополнительные внешние возмущения. Это требует проведения дополнительных эмпирических исследований, определения способов и методов управления системой «буксир – буксируемое судно» для решения задачи обеспечения устойчивости движения буксируемого судна, т. е. минимизации его рыскания [6–8].
В работе представлен алгоритм, позволяющий стабилизировать движение буксируемого судна при отягчающих внешних факторах. В основу алгоритма положена модель углового движения судна, включающая угловую скорость буксируемого судна и угол перекладки руля. Доказано схождение предложенного алгоритма, который обеспечивает стационарность движения буксируемого судна.
Заключение
Доказанная возможность стабилизации рыскания буксируемого судна и составленный алгоритм такой стабилизации позволяют решить задачу буксировки по заданной траектории.
Алгоритм стабилизации «сходится» даже при наличии внешних существенных возмущений и позволяет обезопасить проведение буксирных операций по системе «буксир – буксируемое судно».
1. Бражный А. И. Навигационная безопасность каравана при морских и океанских буксировках плавучих сооружений: дис. … канд. техн. наук. Мурманск, 2018. 168 с.
2. Гуров П. В. Управляемость буксирного состава в сложных путевых и метеорологических условиях: автореф. дис. ... канд. техн. наук. Н. Новгород, 2013. 20 с.
3. Юдин Ю. И., Ищейкин Г. Ю. Моделирование изменений длины и натяжения троса в процессе выполнения буксирной операции // Мор. интеллектуал. технологии. 2020. № 4-4 (50). С. 8–12.
4. Юдин Ю. И., Ищейкин Г. Ю. Управление движением буксируемого судна путем изменения натяжения и длины буксирного троса // Эксплуатация мор. трансп. 2022. № 4 (105). С. 10–19.
5. Каян В. В. Разработка безопасных способов маневрирования судна при выполнении буксирных операций: автореф. дис. ... канд. техн. наук. Мурманск, 2014. 22 с.
6. Пат. 2470828 Рос. Федерация, МПК В 63 Н 25/04 (2006.01). Способ управления траекторией движения буксируемого судна / Юдин Ю. И., Каян В. В. № 2011115725/11; заявл. 20.04.2011; опубл. 27.12.2012.
7. Пат. 2615846 Рос. Федерация, МПК В 63 Н 25/04 (2006.01). Способ управления движением буксирной системы / Юдин Ю. И., Власов А. В., Кайченов А. В., Висков А. Ю. № 2015143563/15; заявл. 12.10.2015; опубл. 11.04.2017.
8. Юдин Ю. И., Пашенцев С. В. Оценка безопасности буксирной операции методами математического моделирования. М.: Моркнига, 2015. 142 с.
