











Russian Federation
Moscow, Russian Federation
Russian Federation
UDC 519.683
UDC 004.052
The problem of electromagnetic monitoring, detection and tracking of low-power radio emission from unmanned aerial vehicles (UAVs) using the amplitude-difference method is being solved. An overview of the most commonly used signals of telemetry and control of UAVs has been conducted, their spectral electromagnetic portraits have been evaluated, an amplitude-difference method for tracking low-power radiation sources of UAVs has been described, and an automatic air space monitoring system has been developed. Special attention is paid to the multi-lobed nature of the antenna-feeder system's directional patterns, methods for reducing side lobes, and the resulting nonlinear effects. The effectiveness of the proposed method of increasing the sensitivity of the radio locator is analytically shown, the possibility of linearization and increasing the average steepness of the direction-finding characteristics of the antenna system by introducing a decoupling device is demonstrated. The described decoupling device is a flat multilayer dielectric structure with losses capable of effectively absorbing electromagnetic radiation over a wide range of wavelengths and incident angles. A distinctive feature of the proposed monitoring system is its operation in a completely passive mode, i.e. without emitting electromagnetic energy into the surrounding space, which significantly increases electromagnetic compatibility and simplifies the process of implementing the system into existing information and communication networks. The described system is designed to solve the problem of airspace zoning, increase the safety of the civil engineering sector and critical infrastructure facilities. The described problems and methods of their solution can be useful in the construction of similar amplitude-difference angle-measuring locators, as well as low-power radio direction finders and electromagnetic field sensors.
electromagnetic monitoring system, unmanned aerial vehicles, passive radar, multipole radiation pattern, amplitude-difference method
Введение
Современное развитие робототехники и беспроводных сетей связи привело к широкому распространению беспилотных летательных аппаратов (БПЛА) [1–5]. Достижения в области управляемого электропривода и систем накопления и хранения энергии сделали возможным построение малых БПЛА с высокими показателями удельного подъемного веса, полетной дальности и времени пребывания в воздухе [2]. Основными преимуществами БПЛА в сравнении с пилотируемыми судами являются низкая себестоимость, высокая маневренность, безопасность эксплуатации, а также универсальность применения для решения широкого спектра задач [3–5]. Вместе с этим повсеместное использование беспилотных аппаратов приводит к необходимости их правового регулирования и контроля с целью зонирования воздушного пространства, предупреждения непреднамеренного или незаконного вмешательства в жилые и частные секторы, а также для защиты объектов критической инфраструктуры. Существующие на сегодняшний день системы радиоэлектронной разведки не способны эффективно решать поставленные задачи ввиду высокой себестоимости, пониженной электромагнитной совместимости (в случае активных и полуактивных систем), а также малой отражающей способности дронов и специфического спектрального портрета [6, 7]. Активные автономные радиолокационные системы для достижения высоких характеристик точности и обнаружения используют сверхширокополосные зондирующие радиосигналы, не совместимые с современными высокоскоростными стандартами связи и, как следствие, имеют лишь ограниченное применение. Таким образом, актуальной на сегодняшний день является задача мониторинга электромагнитной обстановки воздушного пространства, пассивной локации источников излучения малой мощности БПЛА и последующего их сопровождения.
Постановка задачи
В данной работе решается задача мониторинга электромагнитной обстановки воздушного пространства (рис. 1).
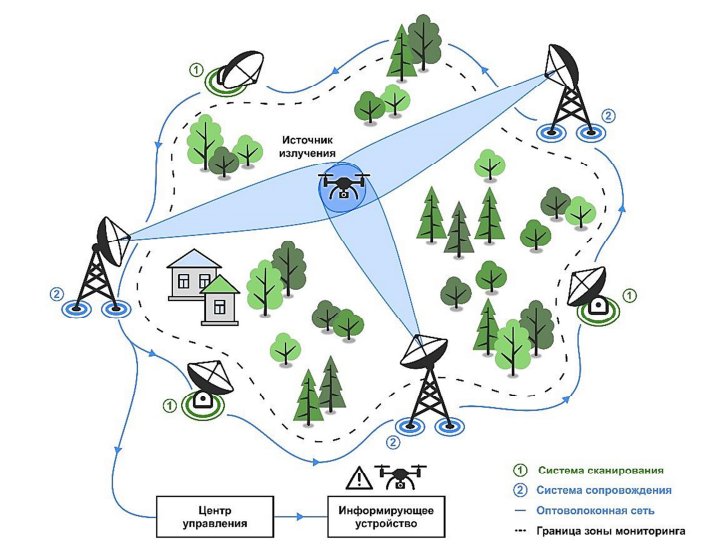
Рис. 1. Структурная схема системы мониторинга радиоизлучения БПЛА
Fig. 1. Structural diagram of the UAV monitoring and radio emission system
Задача сводится к обнаружению БПЛА и его последующему сопровождению внутри зоны мониторинга. Большинство БПЛА предполагает использование беспроводных каналов видеосвязи, телеметрии и управления, преимущественно лежащих в L, S, C-диапазонах частот и осуществляющих непрерывный обмен данными с оператором [7]. Для достижения требуемой полетной дальности БПЛА оснащаются производительными приемо-передающими модулями, непрерывная мощность которых может достигать 30 dBm [8, 9]. По этой причине в данной задаче целесообразно использовать методы пассивного пеленга радиоизлучающих объектов [10] и,
в частности, амплитудно-разностный метод определения углового направления прихода излучения, обеспечивающий наилучшую точность и простоту в сравнении с методом измерения фазовой задержки (временем прихода сигнала) и дальномерными методами [10, 11]. На рис. 1 приведена структурная схема системы мониторинга БПЛА. Так как наличие БПЛА в области мониторинга заранее неизвестно, необходима система сканирования, представляющая собой быстродействующий широкополосный приемник электромагнитного излучения. Как только в обозреваемой области появляется излучающий объект, система сканирования принимает решение об обнаружении и передает приблизительное целеуказание системе сопровождения. Последняя предназначена для точного определения координат объекта и последующего его сопровождения. При потере положения объекта или выходе его за пределы визируемой области система возвращается в режим сканирования. Каждая из указанных систем представляет собой сеть радиолокационных сканирующих и сопровождающих маяков, объединенных общим центром управления, в котором производится обработка данных от каждого маяка и вывод на информирующее устройство.
Дальность обнаружения такой системы зависит, с одной стороны, от мощности, излучаемой БПЛА, и собственной чувствительности, с другой – от мощности внешних электромагнитных помех, способных достигать в плотно населенных районах городской застройки величин 20–30 мкВ/м [12]. Последние ограничивают потенциальную дальность работы до 5–10 км [13], что, тем не менее, позволяет эффективно применять данную систему для мониторинга объектов площадью до 25 км2.
Амплитудно-разностный метод пеленга
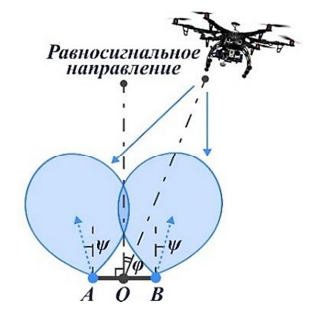
Рассмотрим метод определения угловых координат летательного аппарата в пространстве по его электромагнитному излучению (пассивный пеленг). В первом приближении будем считать передатчик БПЛА всенаправленным изохронным источником электромагнитной энергии, а окружающее пространство – изотропным без потерь. Пренебрегая явлением рефракции на малых дальностях, можно считать, что траектория распространения радиоволн в однородной среде представляет собой прямую линию. Следовательно, задача пеленга сводится к определению направления прихода излучения цели в двух ортогональных плоскостях углов азимута и места. Для этого используются четыре идентичные антенны, размещенные в точках A, B, C, D с разнесенными узкими диаграммами направленности (ДН). Антенны закреплены на поворотной базе с геометрическим центром в точке O. Луч, проведенный из этой точки нормально к базе, будем называть равносигнальным направлением. Если источник излучения находится на этом направлении, приходящая электромагнитная волна попадает на участки диаграмм направленности антенн с равным коэффициентом усиления, вследствие чего в них возбуждается равная по величине ЭДС. При смещении источника от равносигнального направления на угловое расстояние (φ, θ) (см. рис. 2, а) в одной из них будет возбуждаться большая по модулю ЭДС, в другой – меньшая.
|
а |
б |
|
Рис. 2. Амплитудно-разностный метод пеленга: а – в пространстве; б – на плоскости Fig. 2. Amplitude-difference bearing method: a – in space; б – on a plane |
|
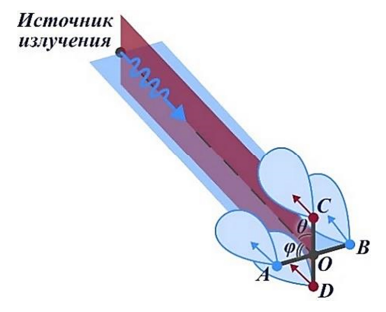
Таким образом, по разности значений ЭДС можно судить о величине и направлении углового смещения источника излучения в каждой из плоскостей.
Более наглядно описанный принцип иллюстрируется на рис. 2, б. Пренебрегая влиянием земной поверхности, можно считать обе плоскости идентичными, поэтому здесь рассмотрим лишь одну из них. Здесь изображены две одинаковые направленные антенны, размещенные в точках A и B, повернутые на угол Ψ и –Ψ относительно равносигнального направления соответственно. В данном идеальном случае антенны описываются только главными лепестками ДН, максимумы которых обозначены на рисунке пунктирными стрелками. Как будет показано далее, пеленгационная характеристика такой системы в пределах области удержания является монотонно убывающей функцией, что очень удобно при построении систем углового сопровождения. Однако на практике часто проявляется многолепестковый характер ДН, приводящий к искажению монотонной характеристики.
Влияние многолепесткового характера ДН на пеленгационную характеристику
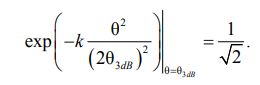
В подобных следящих системах могут применяться антенны различных конфигураций, которые неизбежно имеют боковые и задние лепестки, оказывающие существенное влияние на пеленгационную характеристику. Для их учета аппроксимируем ДН антенн F(φ, θ) экспоненциальным рядом следующего вида [14]:

где N(φ, θ) – число учитываемых лепестков ДН; Ai, Bj – коэффициенты направленного действия антенны по углам φi, θj соответственно; ![]() – сечение лепестка уровнем половинной мощности по угловому направлению (φi, θj); k = 4 ∙ ln(2) – коэффициент ширины лепестка, определяемый из формулы
– сечение лепестка уровнем половинной мощности по угловому направлению (φi, θj); k = 4 ∙ ln(2) – коэффициент ширины лепестка, определяемый из формулы
Тогда результирующая диаграмма двух антенн, повернутых на угол 2Ψ, в соответствии с рис. 2, б может быть представлена в виде
![]()
а пеленгационная характеристика, соответственно:
![]()
Для уменьшения влияния боковых лепестков антенн и увеличения крутизны их пеленгационной характеристики между антеннами должно быть добавлено устройство развязки. В простейшем случае оно представляет собой поглощающий диэлектрический экран, разделяющий антенны. Если известно ослабление, вносимое развязывающим устройством при нормальном падении электромагнитной волны, его коэффициент пропускания можно описать как
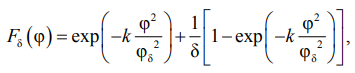
где φδ – угол половинного затенения одной из антенн развязывающим устройством. Тогда ДН антенн A и B (см. рис. 2, б) имеют вид
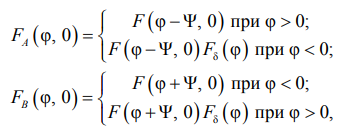
а пеленгационная характеристика в таком случае примет вид
![]()
На рис. 3, а представлены нормированные ДН антенн для главного лепестка шириной 70°, двух симметричных боковых лепестков уровнем 0,4 от главного, разнесенных на 90° относительно него, а также двух симметричных задних лепестков уровнем 0,3 от главного, разнесенных на 150° относительно него.
|
а |
б |
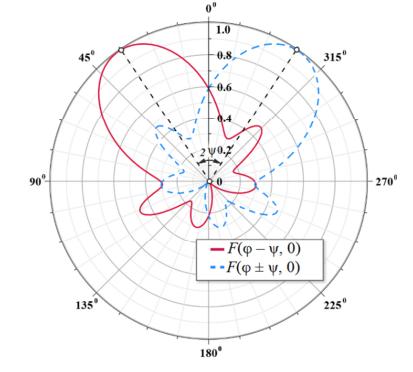
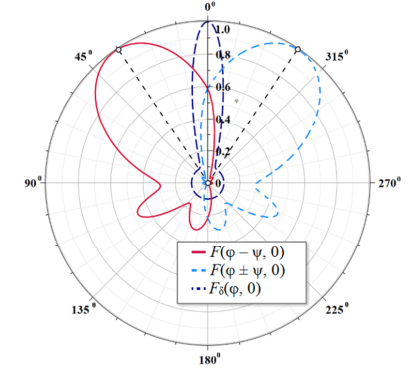
Рис. 3. Нормированные диаграммы направленности антенн:
а – разнесенных на угол 70°; б – с устройством развязки между ними (боковые лепестки подавлены)
Fig. 3. Normalized radiation patterns of the antennas:
a – separated by an angle of 70°; б – with a decoupling device between them (side lobes suppressed)
Соответствующая пеленгационная характеристика представлена на рис. 4 (пунктирная кривая).
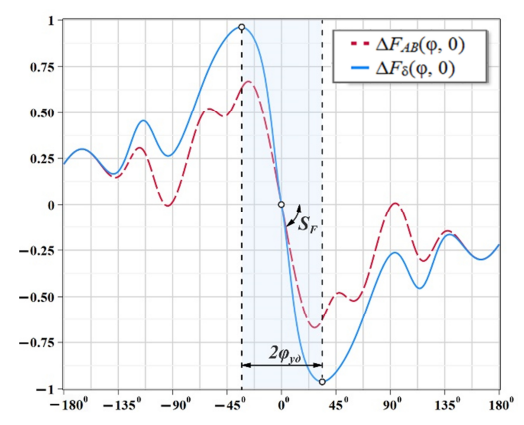
Рис. 4. Пеленгационные характеристики двух антенн, разнесенных на 70°:
с развязывающим устройством (сплошная кривая) и без (пунктирная кривая)
Fig. 4. Direction finding characteristics of two antennas separated by 70°:
with decoupling device (solid curve) and without (dashed curve)
На рис. 3, б представлены нормированные диаграммы направленности при тех же параметрах, но с внесенным между антеннами устройством развязки, обеспечивающим затухание δ = 10 dB и угол половинного затенения φδ = 20°. Соответствующая такой системе пеленгационная характеристика представлена на рис. 4 (сплошная кривая). Рост крутизны пеленгационной характеристики приводит к повышению чувствительности системы, что улучшает ее точностные характеристики и увеличивает дальность сопровождения целей. Кроме того, при определенных значениях параметров системы возможно наложение бокового лепестка одной антенны на главный лепесток другой, что приводит к возникновению на пеленгационной характеристике участка с положительной крутизной (рис. 5, пунктирная кривая).
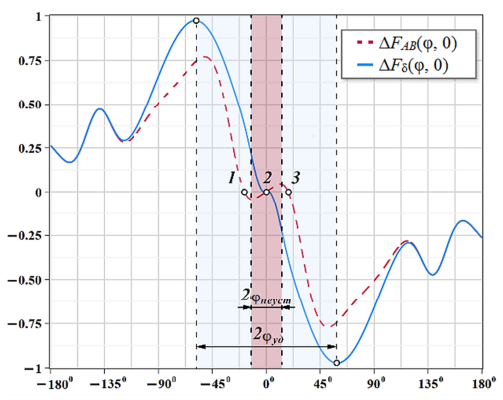
Рис. 5. Возникновение участка с положительной крутизной на пеленгационной характеристике антенн,
разнесенных на 6 (пунктирная кривая) и подавление этого эффекта (сплошная кривая)
(пунктирная кривая) и подавление этого эффекта (сплошная кривая)
Fig. 5. The appearance of a section with a positive slope on the direction-finding characteristic
of antennas spaced by 60° (dashed curve) and the suppression of this effect (solid curve)
Добавленное устройство развязки позволяет локально сузить диаграммы направленности антенн, подавить боковые лепестки, что в результате приводит к линеаризации разностной характеристики и повышению ее крутизны в окрестности нуля:
При этом, как известно [15], возникают две устойчивые стационарные точки (1 и 3) и одна неустойчивая (2), приводящая к возрастанию ошибки слежения в пределах области ![]() . Использование развязывающего устройства уменьшает уровень боковых лепестков, сохраняя монотонность характеристики, что позволяет избежать возникновения неустойчивой области.
. Использование развязывающего устройства уменьшает уровень боковых лепестков, сохраняя монотонность характеристики, что позволяет избежать возникновения неустойчивой области.
Расчет устройства развязки антенно-фидерной системы
В настоящее время в задаче синтеза радиопоглощающих структур и покрытий на их основе нашли широкое применение следующие методы [16, 17]: метод преобразования наклонно падающей волны в поверхностную волну с последующим ее затуханием; дифракционный метод рассеяния излучения; интерференционный метод гашения волн; метод согласования волновых импедансов свободного пространства и поглощающего слоя. Недостатком первых трех методов является узкая полоса частот, вне которой невозможно эффективное поглощение электромагнитной энергии, а также значительно ограниченный сектор углов падения [17]. Метод согласования импедансов не имеет указанных ограничений, однако требует минимизации коэффициента отражения структуры в большом диапазоне углов падения. Последнее условие может быть достигнуто применением согласующих многослойных пленочных структур [18].
На рис. 6 приведена многослойная немагнитная поглощающая структура, в основе которой лежат плоские диэлектрические слои с проницаемостью εi и толщиной hi каждый.
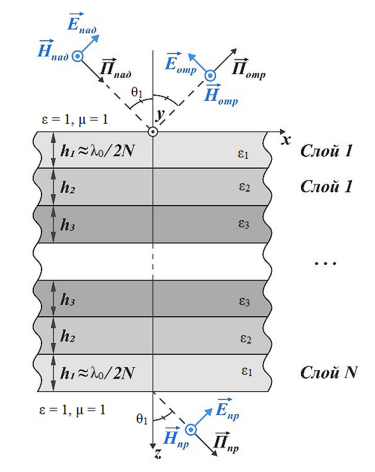
Рис. 6. Многослойная немагнитная поглощающая структура:
εi, μi – материальные параметры i-го слоя; hi – толщина i-го слоя;
![]() – электрическая и магнитная компоненты падающей, отраженной
– электрическая и магнитная компоненты падающей, отраженной
и прошедшей волн соответственно; ![]() – плотности потока мощности перечисленных волн
– плотности потока мощности перечисленных волн
Fig. 6. Multilayer non-magnetic absorbing structure: multilayer non–magnetic absorbing structure:
εi, μi – material parameters of the i-th layer; hi – thickness of the i-th layer;
![]() – electrical and magnetic components
– electrical and magnetic components
of incident, reflected and transmitted waves, respectively; ![]() – power flux densities of the listed waves
– power flux densities of the listed waves
Материалы внутренних слоев структуры подобраны таким образом, чтобы обеспечивать максимальное ослабление электромагнитной волны посредством токов проводимости (Im(ε3) ≪ 0). Внешние слои необходимы для четвертьволнового согласования импедансов внутренних слоев и внешней среды. Для этого параметры слоя выбраны как h1 ≈ λ0 / 4√(ε1), где λ0 = 1 / 2(λmin + λmax) – центральная длина волны, [λmin; λmax] – диапазон длин волн, подлежащих ослаблению; ε1 = 1 / 2(1 + ε2) – диэлектрическая проницаемость слоя.
Задача аналитического нахождения коэффициентов отражения R, прохождения T и поглощения A как функций угла падения θ1 представленной структуры решается для плоско поляризованной TM-волны и бесконечно протяженных в плоскости XOY слоев. Для решения используется хорошо известный метод характеристических матриц переноса [19]. Так, матрица переноса волны через i-й слой имеет вид
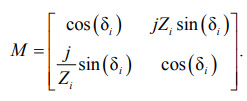
Использованные в ней параметры связаны с исходными условиями задачи следующими обозначениями:
– оптическая толщина i-го слоя:
![]()
– импеданс слоя:
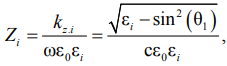
где ![]() – проекция волнового вектора на ось Z в i-м слое;
– проекция волнового вектора на ось Z в i-м слое; ![]() – толщина i-го слоя; c – скорость света в вакууме;
– толщина i-го слоя; c – скорость света в вакууме; ![]() – циклическая частота волны;
– циклическая частота волны; ![]() – материальные параметры слоя.
– материальные параметры слоя.
Характеристическая матрица M всей структуры является произведением матриц каждого слоя. В дальнейшем элементы матрицы M будем обозначать как mi, j:
С учетом этого амплитудные коэффициенты отражения и прохождения можно выразить как
Рассматривая систему как изолированную, выразим коэффициент поглощаемой мощности:
![]()
Графические зависимости мощностных коэффициентов отражения и поглощения от угла падения и длины волны приведены на рис. 7.
|
а |
б |
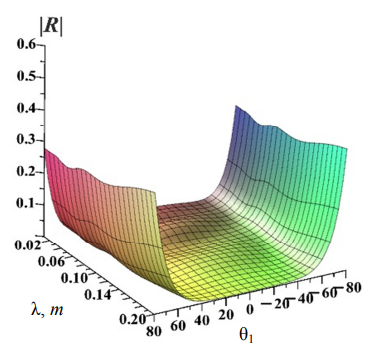
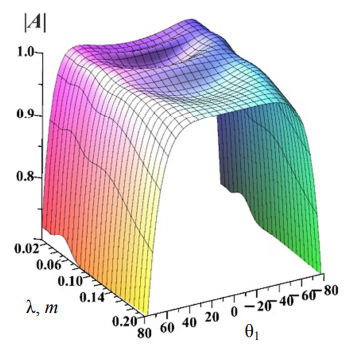
Рис. 7. Зависимость коэффициентов отражения R (a)
и поглощения A (б) от угла падения и длины волны
Fig. 7. Dependence of the reflection coefficients R (a)
and absorption coefficients A (б) on the angle of incidence and wavelength
Для моделирования использовались следующие параметры: ε1 = 1,3 – j0,5; ε2 = 2,2 – j1,5; ε3 = 5,8 – j12,5; h1 = h2 = 25 мм; h3 = 30 мм; N = 7 (порядок слоев: h1, h2, h3, h2, h3, h2, h1). Для удобства численной оценки эффективности поглощения электромагнитной энергии рассмотрим графики коэффициентов (рис. 8) на длине волны λ = 12,5 см (f = 2,4 ГГц), соответствующей наиболее распространенным каналам передачи видео- и телеметрии БПЛА [7].
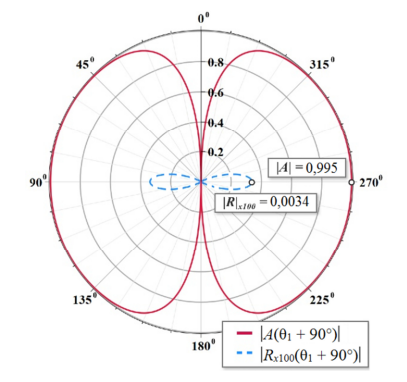
Рис. 8. Зависимость коэффициентов отражения R и поглощения A
от угла падения при длине волны λ = 12,5 см
Fig. 8. Dependence of the reflection coefficients R and absorption A
on the angle of incidence at a wavelength of λ = 12.5 cm
Для заданных параметров расчета модули коэффициентов отражения и прохождения при нормальном падении волны на структуру соответственно составили
Таким образом, описанный метод позволяет создавать плоские диэлектрические экраны с малыми коэффициентами отражения и прохождения в широком диапазоне длин волн и углов падения. Как было показано ранее, наличие устройства развязки антенно-фидерной системы позволяет в значительной мере повысить чувствительность системы и характеристики обнаружения.
Структура радиолокационной системы
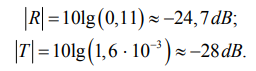
В соответствии с описанным методом предложена структура радиолокационной системы (рис. 9), представляющая собой систему из двух идентичных направленных антенн A, B, разделенных между собой развязывающим устройством и закрепленных на подвижном основании, способном вращаться в плоскости антенн посредством мотора M.
Рис. 9. Структурная схема радиолокационной системы (для слежения за направлением прихода излучения на плоскости)
Fig. 9. Block diagram of the radar system (for tracking the direction of arrival of radiation on the plane)
Выходы антенн коаксиальными линиями соединены с полосовыми фильтрами ПФ1-2, обеспечивающими частотную селекцию принятого сигнала. Далее мощность сигнала повышается широкополосными СВЧ-усилителями У1-2, позволяющими системе обнаруживать цели на расстоянии до нескольких километров, после чего в каждом из каналов выделяется огибающая сигнала блоком логарифмических детекторов Д1-2. Во избежание накопления ошибки слежения, а также обеспечения астатизма системы продетектированные сигналы поступают на интегрирующие фильтры ФНЧ1-2, после чего вычитаются в дискриминаторе Дис. и поступают по петле обратной связи на мотор M, поворачивающий подвижное основание с антенной системой и развязывающим устройством до тех пор, пока угловая ошибка не достигнет нуля. Таким образом происходит автоматическое слежение системой за угловым направлением прихода излучения. Для перестройки по частоте и дальности сканирования производится предварительная настройка блоков ПФ и У. Выходными данными системы является угол отклонения объекта в одной из плоскостей (азимута или места) относительно выбранной локальной системы координат.
Экспериментальный макет
Согласно рассмотренной структурной схеме разработан и изготовлен экспериментальный макет автономной пассивной радиолокационной системы для мониторинга радиоизлучения малой мощности БПЛА (рис. 10).

Рис. 10. Лабораторный макет радиолокационной системы электромагнитного мониторинга
Fig. 10. Laboratory model of the electromagnetic monitoring radar system
Для приема использованы широкополосные логопериодические антенны, хорошо аппроксимируемые описанной выше моделью ДН. Приемно-детектирующее устройство рассчитано на работу в L, S, C-диапазонах частот, обеспечивая необходимую чувствительность для сопровождения источника мощностью 7 dBm на расстоянии до 5 км. Полностью пассивный режим работы и высокая чувствительность позволяют использовать данную систему для обнаружения БПЛА с сохранением электромагнитной совместимости с телекоммуникационным и вещательным оборудованием.
Заключение
В данной работе предложено решение задачи электромагнитного мониторинга, обнаружения и сопровождения радиоизлучения малой мощности БПЛА с применением автономной пассивной локационной системы на основе амплитудно-разностного метода. Отличительной особенностью системы является функционирование в полностью пассивном режиме, без излучения электромагнитной энергии во внешнее пространство, благодаря чему достигается высокая совместимость с различным оборудованием беспроводной широкополосной радиосвязи и вещания. В работе уделено особое внимание многолепестковому характеру диаграмм направленности антенно-фидерной системы, методам уменьшения боковых лепестков, а также возникающим из-за этого нелинейным эффектам. Подробно описано устройство развязки, позволяющее в значительной степени увеличить крутизну и линейность пеленгационной характеристики, а также расширить область удержания, тем самым улучшая точностные характеристики и дальность работы. Показана возможная техническая реализация радиопеленгатора такой системы.
1. Mohsan S. A. H., Khan M. A., Noor F., Ullah I., Al-sharif M. H., Abu-Lehyeh S. A. H., Othman N. Q. H., Li Y. Unmanned aerial vehicles (UAVs): practical aspects, applications, open challenges, security issues, and future trends. Intelligent Serv Robotics, 2023, vol. 16, pp. 109-137.
2. Majeed S., Sohail A., Qureshi K. N., Kumar A., Iqbal S., Lloret J. Unmanned aerial vehicles optimal airtime estimation for energy aware deployment in IoT-enabled fifth generation cellular networks. EURASIP Journal on Wireless Communications and Networking, 2020, vol. 2020, no. 254, 14 p. DOI:https://doi.org/10.1186/s13638-020-01877-0.
3. Kulikova M. E., Drobkova O. S., Platonov P. V. Technological Progress in the Field of Unmanned Aerial Vehicles: Retrospective and Forecast. Proc. of the 2025 7th International Youth Conference on Radio Electronics, Electrical and Power Engineering (REEPE) (Moscow, Russia; Cairo, Egypt; Sharjah, United Arab Emirates, April 8–10, 2025). Moscow, MPEI, 2025. Pp. 1-5.4.
4. Kiss B., Ballagi A., Kuczmann M. Overview Study of the Applications of Unmanned Aerial Vehicles in the Transportation Sector. Engineering Proceedings, 2024, vol. 79, pp. 1-14.
5. Teixeira K., Miguel G., Silva H. S., Madeiro F. A Survey on Applications of Unmanned Aerial Vehicles Using Machine Learning. IEEE Access, 2023, vol. 11, pp. 117582-117621.
6. Hamdalla M. Z. M., Caruso A. N., Hassan A. M. Electromagnetic compatibility analysis of quadcopter UAVs using the equivalent circuit approach. Journal of Antennas and Propagation, 2022, vol. 3, pp. 1090-1101.
7. Hamdalla M. Z. M., Roacho-Valles J. M., Caruso A. N., Hassan A. M. Electromagnetic Compatibility Study of Quadcopter UAVs: Characteristic Mode Analysis of the Frame's Material and Shape Effect. Progress in Electromagnetics Research M, 2022, vol. 112, pp. 1-14. DOI:https://doi.org/10.2528/PIERM22062907.
8. Akhter Z., Bilal R. M., Telegenov K., Feron E., Shamim A. Indigenously Developed HD Video Transmis-sion System for UAVs Employing a 3 × 3 MIMO Antenna System. IEEE Open Journal of Antennas and Propagation, 2022, vol. 3, pp. 940-947.
9. Yan C., Fu L., Zhang J., Wang J. A Comprehensive Survey on UAV Communication Channel Modeling. IEEE Access, 2019, vol. 7, pp. 107769-107792.
10. Sivers A. P., Suslov N. A., Metel'skij V. I. Osnovy radiolokacii: uchebnoe posobie [Radar fundamentals: a tutorial]. Leningrad, Sudpromgiz Publ., 1959. 355 p.
11. Sajbel' A. G. Osnovy radiolokacii: uchebnik dlya vtuzov [Radar fundamentals: a textbook for universities]. Moscow, Sovetskoe radio Publ., 1961. 384 p.
12. Tang C., Yang C., Cai R. S., Ye H., Duan L., Zhang Z., Shi Z., Lin K., Song J., Huang X., Zhang H., Yang J., Cai P. Analysis of the relationship between electromagnetic radiation characteristics and urban functions in highly populated urban areas. Science of the Total Environment, 2018, vol. 654, pp. 535-540.
13. Vytovtov K. A., Barabanova E. A., Ivanov M. G. Lokal'naya radiolokacionnaya sistema navigacii dlya privyaznyh vysotnyh platform [Local radar navigation system for tethered high-altitude platforms]. Avtomatizaciya v promyshlennosti, 2024, no. 06, pp. 56-59.
14. Balanis C. A. Antenna Theory: Analysis and Design. Wiley, 2016. 1104 p.
15. Andronov A. A., Vitt V. V., Hajkin S. E. Teoriya kolebanij [Oscillation theory]. Moscow, Gos. izd-vo tekhniko-teoret. lit., 1935. 567 p.
16. Fedyunin P. A., Dmitriev D. A. Metody sinteza ra-diopogloshchayushchih pokrytij [Methods for synthesizing radio-absorbing coatings]. Vestnik rossijskih universitetov. Matematika, 2002, no. 1, pp. 96-100.
17. Latypova A. F., Kalinin Yu. E. Analiz perspektivnyh radiopogloshchayushchih materialov [Analysis of promising radio-absorbing materials]. Vestnik Voronezhskogo gosudarstvennogo tekhnicheskogo universiteta, 2012, no. 6, pp. 70-76.
18. Krylova T. N. Interferencionnye pokrytiya. Optich-eskie svojstva i metody issledovaniya [interference coatings: optical properties and research methods]. Leningrad, Mashinostroenie Publ., 1973. 224 p.
19. Born M., Wolf E. Principles of Optics. Cambridge, Cambridge University Press, 2019. 986 p.
