











Russian Federation
Russian Federation
Russian Federation
A method for selecting anchor-mooring mechanisms based on the generalized characteristics obtained as a result of calculation is proposed, in conditions of a shortage of ship equipment. The article considers electric drives of anchor-mooring mechanisms based on asynchronous electric motors and reveals that some of them do not have the ability to switch the stator winding connection scheme in the terminal box. It is proposed to connect the winch electric drive through a matching transformer in case of a mismatch between the supply voltage of the electric drive and the ship's network. A single-line diagram is given, including a ship generator with a load, a matching transformer and an electric motor of the winch drive. The operating modes of the winch electric drive are analyzed: lose/take in and park under current, and an explanation is given regarding the calculation and modeling of the winch drive power supply system. It is said that the modeling of the system was performed using a simulation model previously developed by the authors. The power ranges of generators, matching transformers and electric motors for which the simulation was performed are given. The values of the maximum voltage drop at the start of the electric drive are determined, both for the ship's network voltage and for the supply voltage of the electric motor. The dependences for the power supply system with different values of the electric motor and transformer power at different generator loads, constructed based on the results of the analysis of transient processes, are given. A generalized assessment of the obtained dependencies is given, as well as recommendations for their application when selecting the winch power and determining the required power of the matching transformer, taking into account the requirements established by the designer and the Russian Classification Society. Conclusions are made and the practical value of the work at the design stage during the modernization of anchor and mooring winches is substantiated.
anchor and mooring mechanisms, winch electric drive, asynchronous electric motor, winding connection circuit, ship's network, simulation model, matching transformer, transformer power, system modeling
Введение
Санкционный режим последних лет отразился в дефиците оборудования, что создало определенные трудности в области судостроения на этапах конструирования и насыщения судов. При подборе оборудования по расчетным параметрам возникает проблема его выбора, что зачастую приводит к необходимости выполнения дополнительных расчетов и внесения изменений в конструкции. Так, при подборе палубного оборудования, исходя из номинальных данных, необходимо учитывать различные параметры, а в силу ограниченности стандартных устройств предлагаемой серии приходится идти на увеличение мощности изделий. Соответственно, увеличиваются массогабаритные параметры и значения пусковых токов электродвигателей (ЭД), что в общем итоге может привести к необходимости увеличения мощности источника электроэнергии.
Потребительский спрос сформировал определенную зависимость, что стандартный ряд палубных механизмов, имеющих электрическое питание напряжением 380 В, более широкий по сравнению с рядом устройств, работающих от 220 В. Кроме того, устройства, имеющие малую мощность (единицы киловатт), имеют обмотки ЭД, собранные по стандартной схеме соединения без возможности ее коммутации. Исходя из вышесказанного, следует отметить, что подбор палубного механизма с оптимальными параметрами возможен из серии, рассчитанной на работу от сети напряжением 380 В, а в случае, если номинальное напряжение судовой сети равно 220 В, подбор будет затруднен. Самым простым решением возникшей проблемы является согласование напряжений судовой сети и питания электропривода посредством силового трансформатора [1, 2].
Постановка задачи
Реализация такого технического решения обусловлена всего лишь установкой трансформатора, однако неизвестным параметром трансформатора является его мощность. Структурная схема электроснабжения электропривода якорно-швартовной лебедки (ЯШЛ) приведена на рис. 1.
Выбор мощности согласующего трансформатора (СТ) зависит от нескольких параметров: от мощности ЭД, режима работы электропривода, мощности дизель-генератора (ДГ), питающей трансформатор, и т. д. [3, 4]. Следует отметить, что синхронный генератор имеет напряжение 220 В, а используемая ЯШЛ оснащена ЭД с напряжением питания 380 В. Известно множество методик расчета параметров трансформаторов и ЭД, но комплексные расчеты или эмпирические зависимости для получения приблизительных данных при изменении мощностей трансформаторов и ЭД в виде таблиц или графических зависимостей в опубликованных источниках отсутствуют. Выполнение полных расчетов электроэнергетической системы судна на этапе конструкторского подбора оборудования не представляется возможным.
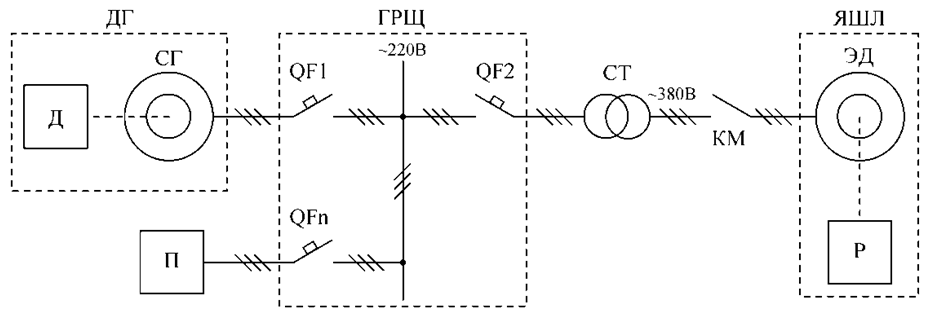
Рис. 1. Структурная схема электроснабжения
Fig. 1. Structural diagram of power supply
Методы исследований
Ранее было обосновано, что метод математического расчета системы электроснабжения электропривода лебедки при изменении нескольких параметров и режимов имеет высокую степень сложности, однако более удобным и наглядным является метод имитационного моделирования [1, 3, 5]. Предложенная имитационная модель позволила сформулировать главные требования к параметрам, которые должны учитываться при выборе мощности СТ, а также наглядно показать, каким образом будут изменяться электрические параметры электропривода и питающей сети при изменении соотношений мощностей трансформатора и ЭД с целью определения соответствия требованиям Российского классификационного общества (РКО) [6].
Описание системы
Целью имитационного моделирования системы электропитания электропривода палубного механизма является формирование зависимостей главных параметров для удобного выбора мощности СТ при заданных параметрах мощности электропривода лебедки и желаемых параметрах в динамических и статических режимах работы механизма. При моделировании обязательным условием является работа механизма в тяговом режиме и режиме стоянки электропривода под током.
Для получения итоговых характеристик выполнено моделирование системы при следующих параметрах оборудования и условиях:
– мощность ЭД палубного механизма – от 1,2; 5; 13,5 кВт;
– мощность СТ – 2,5; 6,3; 10; 63; 100 кВА;
– мощность судовых генераторов при загрузке 0–60 % – 60; 85 кВА;
– максимальное значение времени разгона ЭД палубного механизма до номинального значения на холостом ходу – не более 1,7 с;
– максимальное значение времени разгона ЭД палубного механизма до номинального значения под нагрузкой – не более 2,2 с;
– максимальное значение провала напряжения питания ЭД – не более 40 %;
– максимальное значение провала напряжения судовой сети – не более 6 %.
Для получения более наглядных характеристик условия моделирования установлены шире допустимых РКО.
В результате моделирования системы электроснабжения электропривода лебедки с большим количеством различных соотношений получены диаграммы переходных процессов, по которым определены максимальные и минимальные значения параметров, сведенные в базу данных. По итоговым значениям построены характеристики нескольких параметров в зависимости от единого параметра – загрузки генератора. На характеристиках параметр загрузки генератора представлен в виде коэффициента Kзг, %. Это объясняется тем, что зависимости будут иметь универсальный масштаб мощности при различных соотношениях мощностей генератора и ЭД привода лебедки.
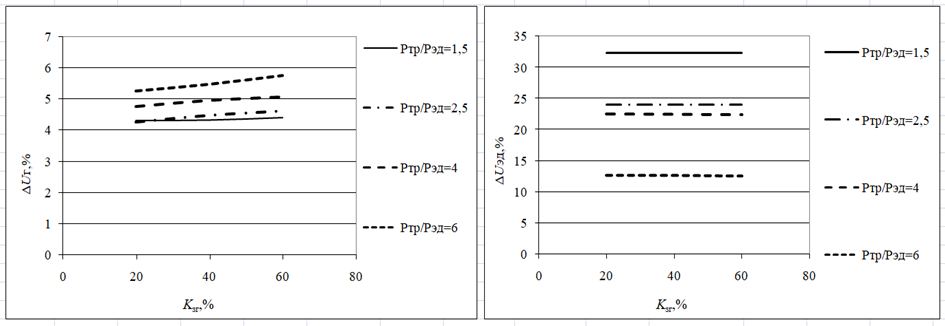
На рис. 2 представлены зависимости максимальных значений падения напряжения судовой сети ΔUг и электродвигателя ΔUэд при его пуске для различных соотношений мощностей трансформатора Ртр и электродвигателя Рэд при изменении загрузки генератора (Kзг). Полученные зависимости справедливы для мощностей генератора Рг и мощности электродвигателя Рэд, взятых в соотношении Рг / Рэд = 5.
а б
Рис. 2. Зависимости величины падения напряжения генератора ΔUг (а) и двигателя ΔUэд (б)
от загрузки генератора Kзг для различных соотношений мощностей трансформатора и электродвигателя
при соотношении мощностей генератора Рг и электродвигателя Рэд (Рг / Рэд = 5)
Fig. 2. Dependences of the voltage drop of the generator ΔUг (а) and the motor ΔUэд (б) on the load of the generator Kзг
for different power ratios of the transformer and the electric motor with the power ratio of the generator Рг
and the electric motor Рэд (Рг / Рэд = 5)
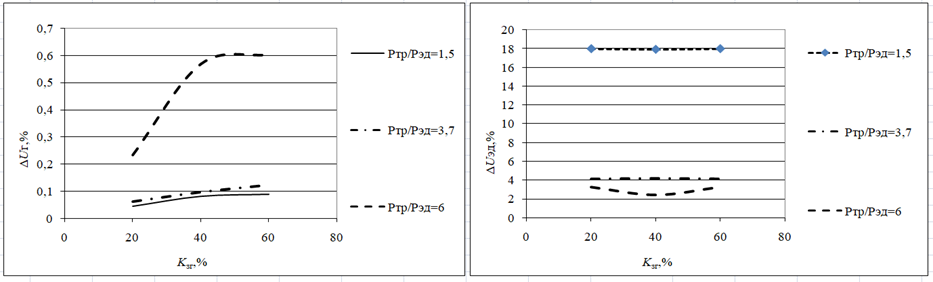
На рис. 3 и 4 представлены зависимости тех же параметров, но соотношения мощностей генератора Рг и электродвигателя Рэд равны 9 и 35 соответственно. При сравнении зависимостей рис. 2 с зависимостями рис. 3 следует отметить, что последние характеристики имеют нелинейный характер, причем чем меньше соотношение мощностей, тем нелинейность более выраженная. И наоборот, на рис. 4 большая нелинейность наблюдается при большем значении соотношения мощностей транс-форматора и ЭД.

а б
Рис. 3. Зависимости величины падения напряжения генератора ΔUг (а) и двигателя ΔUэд (б)
от загрузки генератора Kзг для различных соотношений мощностей трансформатора и электродвигателя
при соотношении мощностей генератора Рг и электродвигателя Рэд (Рг / Рэд = 9)
Fig. 3. Dependences of the voltage drop of the generator ΔUг (а) and the motor ΔUэд (б) on the load of the generator Kзг
for different power ratios of the transformer and the electric motor with the power ratio of the generator Рг
and the electric motor Рэд (Рг / Рэд = 9)
а б
Рис. 4. Зависимости величины падения напряжения генератора ΔUг (а) и двигателя ΔUэд (б)
от загрузки генератора Kзг для различных соотношений мощностей трансформатора и электродвигателя
при соотношении мощностей генератора Рг и электродвигателя Рэд (Рг / Рэд = 35)
Fig. 4. Dependences of the voltage drop of the generator ΔUг (а) and the motor ΔUэд (б) on the load of the generator Kзг
for different power ratios of the transformer and the electric motor with the power ratio of the generator Рг
and the electric motor Рэд (Рг / Рэд = 35)
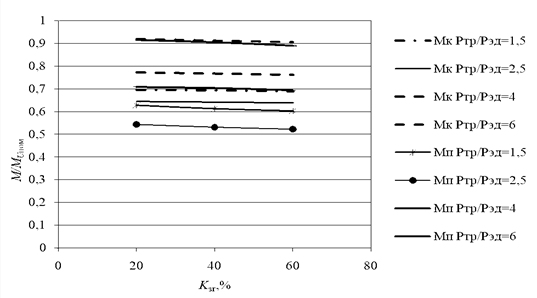
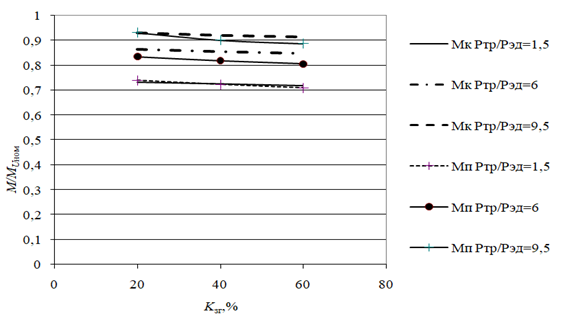
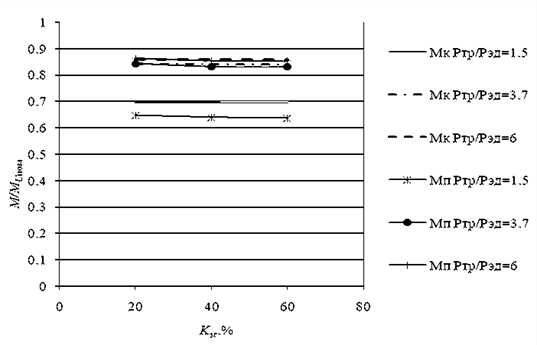
Зависимости отношений пусковых Мп и критических Мк моментов ЭД к их значениям при номинальном напряжении МUном от загрузки генератора Kзг при различных соотношениях мощностей трансформатора Ртр и электродвигателя Pэд приведены на рис. 5. На рис. 5, а зависимости построены при моделировании системы с соотношением мощностей генератора и ЭД, равным Рг / Рэд = 5. Следует отметить, что показатель соотношения М / МUном определяет расхождение значений моментов, которые определены как при снижении питающего напряжения на ЭД, так и при номинальном напряжении (эталонное значение момента) [7–9]. Таким образом, чем ближе значение расчетного момента (пускового Мп или критического Мк) при сниженном напряжении питания ЭД к единице (М / МUном = 1), тем ближе это значение будет к эталонному, т. е. рассчитанному параметру момента при номинальном значении питающего напряжения Uном. Зависимости моментов при соотношениях мощностей генератора Рг и электродвигателя Рэд, равные 9 и 35, представлены на рис. 5, б и 5, в соответственно.
а
б
в
Рис. 5. Зависимости отношений пусковых Мп и критических Мк моментов электродвигателя
к их значениям при номинальном напряжении МUном от загрузки генератора Kзг для различных соотношений
мощностей трансформатора Ртр и электродвигателя Pэд при соотношении мощностей генератора Рг
и электродвигателя Рэд: а – Рг / Рэд = 5; б – Рг / Рэд = 9; в – Рг / Рэд = 35
Fig. 5. Dependences of the ratios of the starting Мп and critical Мк moments of the electric motor to their values
at rated voltage МUном on the load of the generator Kзг for different power ratios of the Ртр transformer and the Pэд electric motor with the ratio of the power of the Рг generator and the Рэд electric motor:
а – Рг / Рэд = 5; б – Рг / Рэд = 9; в – Рг / Рэд = 35
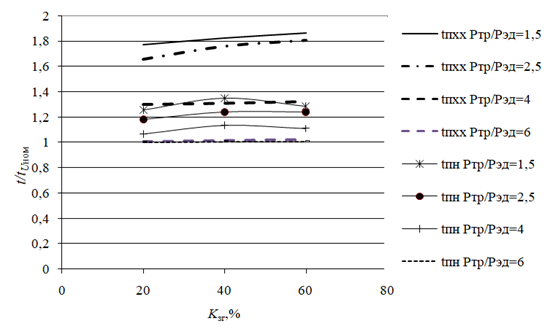
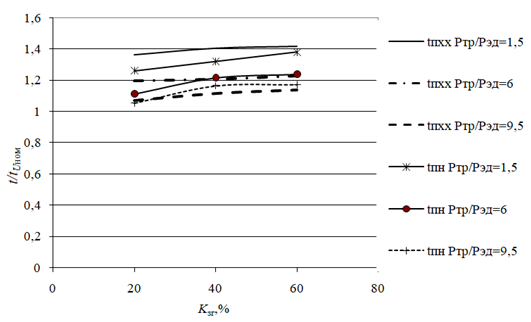
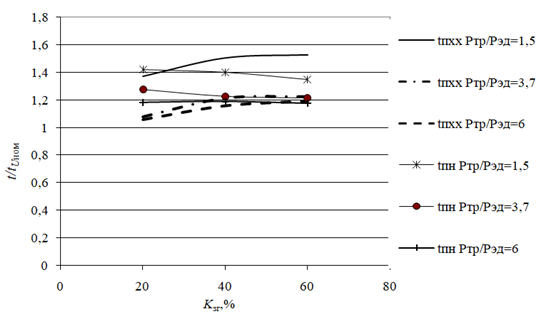
На рис. 6 приведены зависимости отношения времени пуска электродвигателя tп к значениям времени пуска при номинальном напряжении tпUном от загрузки генератора Kзг на холостом ходу (tпхх) и под нагрузкой (tпн). По аналогии с предыдущими зависимостями параметр соотношения времен получен при пуске с номинальным напряжением питания ЭД и при сниженном значении напряжения [10, 11]. Так же: чем ближе значение этого показателя к единице, тем ближе это значение к эталонному, рассчитанному при номинальном напряжении.
Зависимости времени пуска при соотношениях мощностей генератора Рг и электродвигателя Рэд, равных 5, 9 и 35, представлены на рис. 6, а–в соответственно.
Исходя из построенных зависимостей, можно дать оценку изменения параметров с учетом загрузки генератора:
– чем выше мощность трансформатора, тем больше провал напряжения генератора при пуске ЭД, но тем меньше провал напряжения на ЭД, что влияет на значение момента на валу и в конечном счете приводит к сокращению времени пуска;
– чем больше соотношение мощностей генератора и ЭД, тем меньше провал напряжения генератора и питания ЭД;
– поведение характеристик может быть как линейным, так и нелинейным и в основном зависит от загрузки генератора, т. е. от запаса его мощности.
а
б
в
Рис. 6. Зависимости отношений времени пуска электродвигателя на холостом ходу tпхх и под нагрузкой tпн
к их значениям при номинальном напряжении tUном от загрузки генератора Kзг для различных соотношений
мощностей трансформатора Ртр и электродвигателя Pэд при соотношении мощностей генератора Рг
и электродвигателя Рэд: а – Рг / Рэд = 5; б – Рг / Рэд = 9 ; в – Рг / Рэд = 35
Fig. 6. Dependences of the ratio of the start-up time of the electric motor at idle tпхх and under load tпн to their values
at a rated voltage tUном depending on the load of the generator Kзг for different power ratios of the Ртр transformer
and the Pэд electric motor with the ratio of the power of the Рг generator and the Рэд electric motor:
а – Рг / Рэд = 5; б – Рг / Рэд = 9 ; в – Рг / Рэд = 35
Заключение
Приведенные зависимости могут найти применение при выборе судового палубного оборудования, в частности лебедочных механизмов, когда возникают трудности подбора из стандартного ряда. Применение трансформатора может являться простым решением согласования напряжений судовой сети и электропривода, а предложенные зависимости помогут определить мощность трансформатора. Для предварительного определения параметров моментов и времени пуска ЭД лебедки, которые могут быть на реальном судне, необходимо подобрать параметры генератора и ЭД наиболее близкими к расчетным значениям. Если выполнить выбор наиболее соответствующих зависимостей, то можно дать примерную оценку влияния электропривода на судовую сеть и подобрать оптимальную мощность трансформатора, при которой параметры напряжения будут соответствовать требованиям РКО.
1. Popov S. V., Burmakin O. A., Malyshev Iu. S. Rekomendatsii po opredeleniiu moshchnosti soglasuiushchego transformatora dlia pitaniia elektroprivoda iakorno-shvartovnogo mekhanizma [Recommendations for determining the power of the matching transformer for powering the electric drive of the anchor-mooring mechanism]. Intellektual'naia elektrotekhnika, 2025, no. 1 (29), pp. 70-80.
2. Shul'ga R. N., Petrov A. Iu., Labutin A. A. Rynok elektricheskikh mashin i apparatov: dinamika i osnovnye tendentsii [The market of electric machines and apparatuses: dynamics and main trends]. RUM, 2020, no. 4, p. 594.
3. Popov S. V., Burmakin O. A., Malyshev Iu. S. Analiz rezul'tatov modelirovaniia elektroprivoda iakornoi lebedki pri pitanii ot sudovoi seti cherez soglasuiushchii transformator. Tekhnicheskaia ekspluatatsiia vodnogo transporta: problemy i puti razvitiia [Analysis of the simulation results of the electric drive of the anchor winch when powered from the ship's network through a matching transformer. Technical operation of water transport: problems and ways of development]. Materialy VII Natsional'noi (vserossiiskoi) nauchno-tekhnicheskoi konferentsii (Petropavlovsk-Kam-chatskii, 14–15 noiabria 2024 g.). Petropavlovsk-Kam-chatskii, Izd-vo KGTU, 2025. Pp. 67-72.
4. Burkov A. F., Verevkin V. F., Radchenko P. M. Povyshenie energoeffektivnosti morskogo transporta i trans-portnoi infrastruktury [Improving the energy efficiency of maritime transport and transport infrastructure]. Saint Petersburg, Lan' Publ., 2019. 132 p.
5. Malyshev Iu. S., Burmakin O. A., Popov S. V. Imitatsionnaia model' elektroprivoda iakornoi lebedki, rabo-taiushchei ot sudovoi elektrostantsii cherez soglasuiushchii transformator [Simulation model of the electric drive of an anchor winch powered by a marine power plant through a matching transformer]. Svidetel'stvo o registratsii programm dlia EVM № 2024662262 Rossiiskaia Federatsiia, 27.05.2024.
6. Pravila klassifikatsii, postroiki i osvidetel'stvovaniia sudov VVP, sudov smeshannogo (reka – more) plavaniia, plavuchikh ob"ektov [Rules for classification, construction and inspection of GDP vessels, vessels of mixed (river –sea) navigation, floating objects]. Available at: https://rfclass.ru/izdaniya-rko/pravila-klassifikatsii-postroyki-i-osvidetelstvovaniya-sudov-vvp-sudov-smeshannogo-reka-more-plavaniya-plavuchikh-obektov/ (accessed: 20.05.2023).
7. Burkov A. F. Osnovy teorii i ekspluatatsii sudovykh elektroprivodov [Fundamentals of theory and operation of marine electric drives]. Saint Petersburg, Lan' Publ., 2023. 340 p.
8. Tokarev P. N. Stoianka sudna na iakore v stesnennykh putevykh usloviiakh [Anchoring of a vessel in cramped travel conditions]. Nauchnye problemy vodnogo transporta, 2024, no. 78, pp. 234-244. DOI https://doi.org/10.37890/jwt.vi78.442.
9. Burkov A. F., Nguen V. Teoreticheskie polozheniia tekhnicheskoi ekspluatatsii dlia opredeleniia nadezhnosti su-dovykh elektroprivodov [Theoretical provisions of technical operation for determining the reliability of marine electric drives]. Nadezhnost' i bezopasnost' energetiki, 2023, no. 16 (3), pp. 184-191. DOI https://doi.org/10.24223/1999-5555-2023-16-3-184-191.
10. Burkov A. F., Mikhanoshin V. V., Nguen Van Kha. Povyshenie energeticheskoi effektivnosti asinkhronnykh elektroprivodov [Improving the energy efficiency of asynchronous electric drives]. Elektrooborudovanie: ekspluat-atsiia i remont, 2021, no. 11, pp. 7-11.
11. Savenko A. E., Savenko P. S. Issledovanie raboty moshchnogo elektroprivoda v avtonomnom elektrotekh-nicheskom komplekse [Investigation of the operation of a powerful electric drive in an autonomous electrical complex]. Vestnik Ivanovskogo gosudarstvennogo energeticheskogo universiteta, 2017, no. 4, pp. 44-49.
