











Russian Federation
Russian Federation
When building a ship’s electric propulsion system, increased requirements are placed on the reliability and efficiency of a rowing electric drive powered by an autonomous supply system with commensurate power. In particular, the issue of limiting and stabilizing the speed, current consumption and, consequently, the power consumption of the propeller engine under conditions of varying load torque is raised. If the control system is unable to meet these requirements, the normal operation of the diesel generator set is disrupted, up to and including shutting down, reducing fuel consumption efficiency and generator life. The best solution is to directly regulate the active power consumption and adapt the control system to changes in the load moment. There has been developed a new, different from the known, structure of the control system for a synchronous electric propeller, which includes an active power circuit and an adaptive speed controller. Based on the structure, a simulation model of a rowing synchronous electric drive has been developed in the Simulink software package of the MatLab graphical simulation environment. A simulation of the operation of a synchronous electric drive in pitching conditions with the propeller exposed, as well as starting, reversing and stopping under normal conditions was performed. A comparative analysis of a synchronous electric propeller drive with the proposed control system and with a classical control system with an external speed loop is performed. The presented simulation results confirm that the developed control system is adaptive to conditions characterized by fluctuations in the load moment during heavy rolling, and also allows you to regulate the active power consumed by the drive and limit its throws in alternating modes.
adaptive control, propeller, synchronous electric drive, vector control, simulation mathematical modeling, ship electric propulsion system
Введение
Частотно-регулируемый синхронный электропривод широко распространен в промышленности и на транспорте. В частности, электропривод на основе синхронного двигателя применяется в судовых системах электродвижения [1–6].
Особенности данного типа электропривода:
– мощность электропривода соизмерима с мощ-ностью судовой электрической сети;
– вентиляторный характер нагрузки;
– необходимость применения тихоходных двигателей большой мощности.
Ввиду того, что мощность гребного электропривода соизмерима с мощностью судовой электрической сети, резкие броски потребляемой активной мощности могут стать причиной глушения дизельного двигателя, приводящего во вращение генератор. Также необходимо учитывать, что в условиях сильной качки на воде гребной винт оголяется и не совершает полезной работы, поэтому настроенная на нормальный режим система регулирования в моменты нулевой нагрузки может перейти в режим неустойчивой работы.
Превышение допустимой нагрузки электрического генератора, питающего гребной электродвигатель, в течение длительного времени может вызвать перегрев коллектора и обмоток генератора с соответствующими негативными последствиями. Поэтому требования к системе управления гребным электроприводом следующие:
– контроль и ограничение мощности, потребляемой приводом из судовой сети;
– обеспечение оптимального управления синхронной машиной в условиях сильно изменяющейся нагрузки;
– повышенная надежность.
С целью выполнения вышеприведенных требований авторами разработана структурная схема гребного синхронного электропривода, система регулирования которого включает в свой состав контур активной мощности и адаптивный регулятор скорости.
Структура системы управления гребного синхронного электропривода
При разработке имитационной модели гребного синхронного электропривода были приняты следующие допущения:
– в качестве двигателя применена неявнополюсная синхронная машина с постоянными магнитами на роторе;
– не учитывается инерционность преобразователя частоты в составе электропривода, ввиду того что его постоянная времени относительно мала;
– уменьшен момент инерции электродвигателя в 10 раз с целью ускорения процесса компьютерного моделирования.
Номинальная мощность синхронного электродвигателя – 4,65 МВт, число пар полюсов – 5.
Модель синхронного электропривода с векторной системой управления построена во вращающейся синхронно с полем ротора системе координат d–q [7]. Векторное управление применено в рассматриваемом электроприводе, т. к. данный тип управления позволяет вычислять значение момента на валу двигателя, а также его активную мощность, что необходимо для построения контура активной мощности. Разработанная структура системы управления гребным синхронным электроприводом представлена на рис. 1.
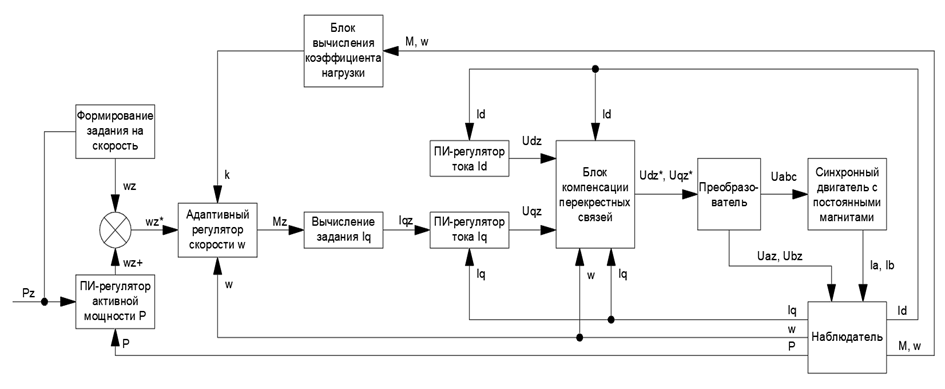
Рис. 1. Структурная схема гребного синхронного электропривода
Fig. 1. The structure of the rowing electric drive control system
Система управления и регулирования синхронным электроприводом построена на основе принципа подчиненного регулирования и содержит два внутренних параллельных контура тока с блоком компенсации перекрестных связей, контур скорости и контур активной мощности. Так как скорость движения судна напрямую зависит от механической мощности на валу, целесообразно в качестве внешнего контура регулирования использовать контур активной мощности.
Момент нагрузки гребного электропривода пропорционален квадрату скорости вращения гребного винта и коэффициенту нагрузки, зависящему от параметров среды. В условиях сильной качки на воде этот коэффициент сильно меняется, особенно когда гребной винт частично или полностью оголяется. Также значение коэффициента нагрузки изменяется при наличии ледниковой каши. Для учета влияния этого изменения на работу контура скорости электропривода применен адаптивный регулятор скорости.
На основании структуры, представленной на рис. 1, в программной среде MatLab Simulink [8, 9] была разработана имитационная модель гребного синхронного электропривода (рис. 2). Структура адаптивного регулятора скорости с контуром активной мощности гребного синхронного электропривода представлена на рис. 3.
На рис. 4 представлена структура блока, посредством которого выполняется имитация вентиляторного момента нагрузки гребного винта в нормальном ходовом режиме и в условиях качки. Также в этом блоке производится вычисление коэффициента нагрузки на основании уравнения второго закона Ньютона для вращательного движения и уравнения зависимости момента двигателя от тока Iq. Значение этого коэффициента используется для корректирования коэффициентов регулятора скорости.
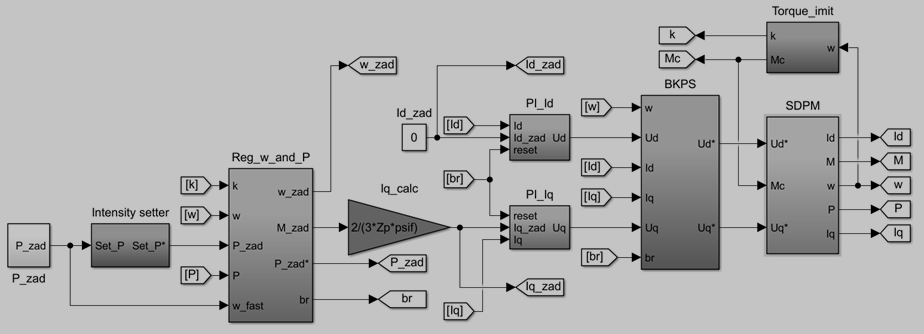
Рис. 2. Имитационная модель гребного синхронного электропривода
Fig. 2. The simulation model of the rowing synchronous electric drive
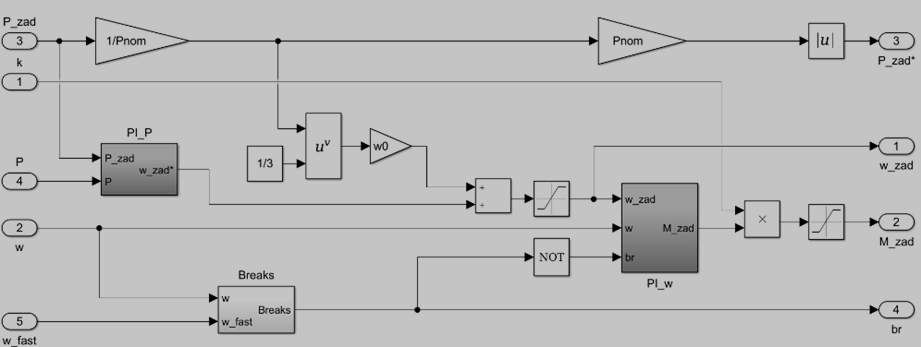
Рис. 3. Структура адаптивного регулятора скорости с контуром активной мощности
Fig. 3. The structure of the adaptive controller of speed with active power circuit
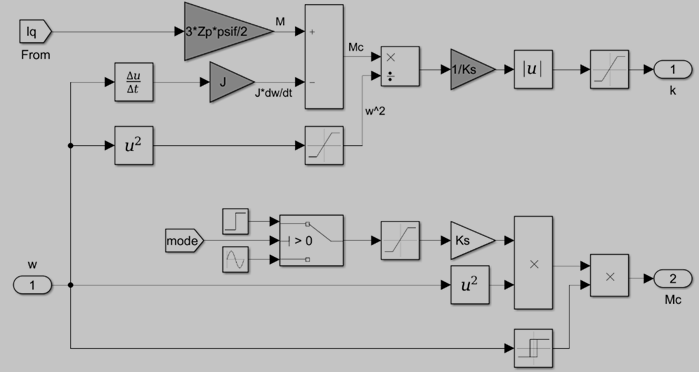
Рис. 4. Структура блока имитации вентиляторного момента и вычисления коэффициента вентиляторной нагрузки
Fig. 4. The structure of the block for simulating the fan torque and calculating the fan load
Так как аналитическое выражение коэффициентов регуляторов для рассматриваемой системы управления ввиду ее сложности получить практически невозможно, то следует прибегнуть к методам подбора [10]. Посредством методом Циглера – Никольса были определены коэффициенты регуляторов токов, скорости и мощности.
Результаты имитационного моделирования гребного синхронного электропривода
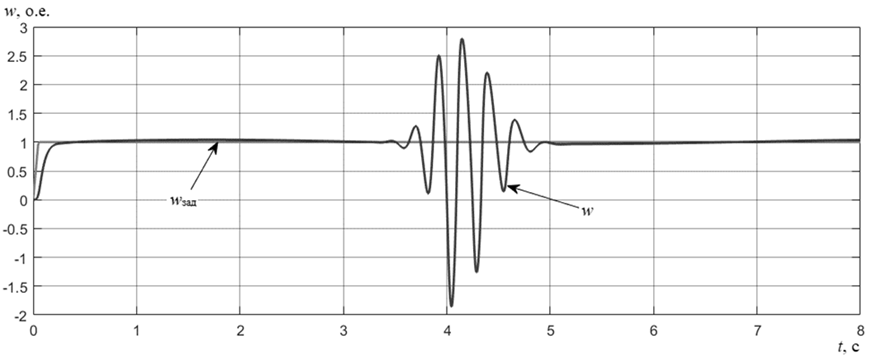
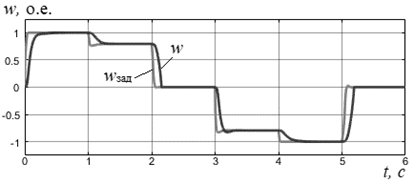
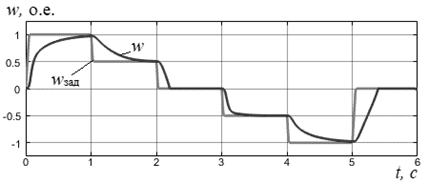
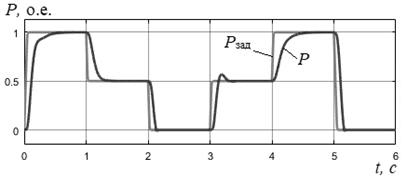
На рис. 5 представлены результаты имитационного моделирования работы гребного синхронного электропривода на вентиляторную нагрузку с косинусоидальным изменением коэффициента нагрузки при оголении гребного винта на 4-й с (wзад – задание скорости, о. е.; w – текущая скорость двигателя, о. е.).
а
б
в
Рис. 5. Временные диаграммы гребного синхронного электропривода в условиях качки:
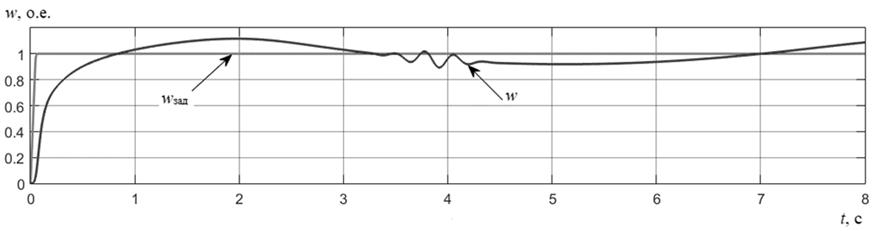
а – с классическим регулятором; б – с уменьшенными коэффициентами классического регулятора;
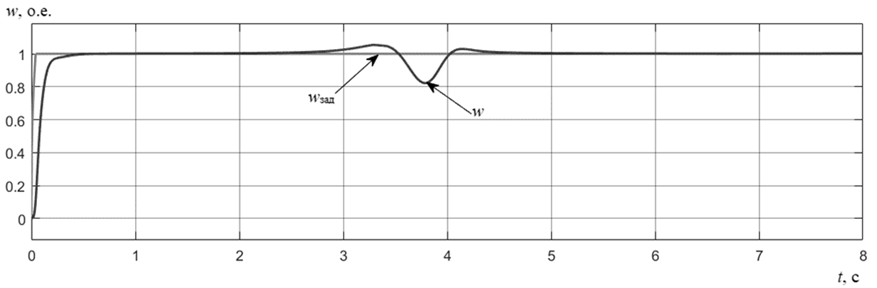
в – с адаптивным регулятором
Fig. 5. Time diagrams of a rowing electric drive in pitching conditions:
а – with a classic regulator; б – with reduced coefficients of a classic regulator; в – with an adaptive regulator
При использовании классического регулятора скорости при уменьшении коэффициента нагрузки система теряет устойчивость (рис. 5, а). Для предотвращения данного эффекта приходится уменьшать коэффициенты регулятора, однако это увеличивает время переходного процесса при нормальном режиме нагрузки (рис. 5, б). А при использовании адаптивного регулятора его коэффициенты автоматически подстраиваются под изменения коэффициента нагрузки, обеспечивая стабильное поддержание скорости электропривода с незначительным колебательным процессом в момент оголения винта (рис. 5, в).
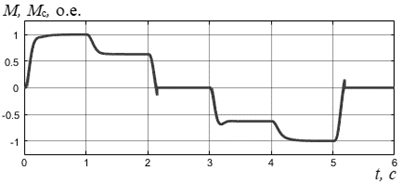
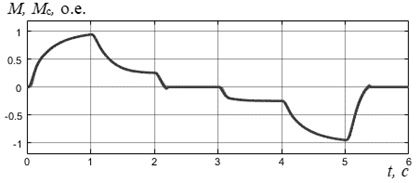
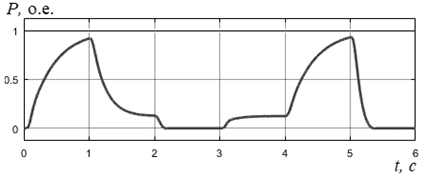
На рис. 6 представлены переходные процессы при пуске на полный ход, при переходе на средний ход, при реверсе и останове гребного двигателя при нормальных условиях нагрузки (Р – механическая мощность на валу двигателя, о. е.; Pзад – задание мощности, о. е.; М – электромагнитный момент двигателя, о. е.; Мс – момент нагрузки, о. е.).
|
1 |
 |
 |
|
2 |
 |
 |
|
3 |
 |
 |
|
|
а |
б |
Рис. 6. Переходные процессы скорости (1), электромагнитного момента (2) и механической мощности (3)
при пуске, реверсе и останове гребного синхронного электропривода:
а – с адаптивным регулятором скорости и контуром активной мощности;
б – с классическим регулятором скорости и пониженными коэффициентами
Fig. 6. Transients of speed (1), electromagnetic torque (2) mechanical power (3)
during start-up, reverse and stop of the electric drive:
а – with adaptive speed control and active power circuit; б – with classic speed control and reduced coefficients
Система регулирования скорости с классическим регулятором с уменьшенными коэффициентами имеет гораздо более длительное время переходного процесса (рис. 5, б) (0,8 с), чем разработанная система управления с адаптивным регулятором скорости и контуром активной мощности (рис. 5, а) (0,4 с), которая обеспечивает более быстрый и стабильный выход на заданные значения без превышения потребления активной мощности и максимально допустимой скорости электропривода.
Заключение
Анализ результатов имитационного моделирования свидетельствует о том, что предложенный вариант системы управления гребного синхронного электропривода обеспечивает регулирование потребляемой двигателем мощности, ограничение ее бросков выше 105 % от номинального уровня, а также адаптацию к изменениям нагрузки в условиях качки и оголения гребного винта, что повышает надежность работы гребного синхронного электропривода при питании от судовой сети соизмеримой мощности.
1. Sokolovskii G. G. Elektroprivody peremennogo toka s chastotnym regulirovaniem [AC electric drives with frequency control]. Moscow, Akademiia Publ., 2006. 265 p.
2. Dar'enkov A. B., Titov V. G., Miriasov G. M., Umiarov D. V. Grebnye elektricheskie ustanovki: uchebnoe posobie [Rowing electric installations: a training manual]. Nizhnii Novgorod, Izd-vo NGTU imeni R. E. Alekseeva, 2015. 207 p.
3. Tikhomirov V. A., Titov V. G., Khvatov S. V. Tekhnicheskie i ekonomicheskie aspekty primeneniia reguliruemykh privodov postoiannogo i peremennogo toka [Technical and economic aspects of the application of adjustable DC and AC drives]. Trudy Nizhegorodskogo gosudarstvennogo tekhnicheskogo universiteta imeni R. E. Alekseeva, 2010, no. 4 (83), pp. 190-204.
4. Ptakh G. K. Obzor grebnykh elektroustanovok i obosnovanie vybora desiatifaznogo induktornogo elektrodvigatelia moshchnost'iu 15 MVt dlia sistemy elektrodvizheniia atomnykh ledokolov [Overview of rowing electrical installations and justification of the choice of a ten-phase inductor electric motor with a power of 15 MW for the electric propulsion system of nuclear icebreakers]. Izvestiia vuzov. Elektromekhanika, 2020, vol. 63, no. 1, pp. 5-18. DOIhttps://doi.org/10.17213/0136-3360-2020-1-5-18.
5. Terekhov V. M., Osipov O. I. Sistemy upravleniia elektroprivodov: uchebnik [Electric drive control systems: textbook]. Moscow, Akademiia Publ., 2005. 304 p.
6. Gel'ver F. A., Belousov I. V., Samoseiko V. F. Grebnye elektricheskie ustanovki sudov bol'shoi moshchnosti [Rowing electric installations of high-power vessels]. Vestnik Permskogo natsional'nogo issledovatel'skogo politekhni-cheskogo universiteta. Elektrotekhnika, informatsionnye tekhnologii, sistemy upravleniia, 2019, no. 30, pp. 7-27.
7. Kalachev Iu. N. Vektornoe regulirovanie (zametki praktika) [Vector regulation (practice notes)]. Moscow, Izd-vo MEI, 2013. 72 p.
8. D'iakonov V. P. MATLAB. Polnyi samouchitel' [MATLAB. The complete tutorial]. Moscow, DMK Press, 2012. 768 p.
9. D'iakonov V. P. Simulink 5/6/7: samouchitel' [Simulink 5/6/7: Self-help guide]. Moscow, DMK Press, 2008. 784 p.
10. Vadutov O. S. Nastroika tipovykh reguliatorov po metodu Tsiglera – Nikol'sa: metodicheskie ukazaniia k vy-polneniiu laboratornykh raboty dlia studentov, obuchaiu-shchikhsia po napravleniiam 210100 «Elektronika i nano-elektronika» i 201000 «Biotekhnicheskie sistemy i tekh-nologii» [Setting up standard regulators using the Ziegler – Nichols method: guidelines for laboratory work for students studying in the fields of 210100 “Electronics and Nanoelectronics” and 201000 “Biotechnical Systems and Technologies”]. Tomsk, Izd-vo TPU, 2014. 10 p.
